【第三種電気主任技術者試験】電磁誘導の完全解説 - 発電・変圧の基礎理論
目次
1. イントロダクション
産業革命以降、電気機械の発展において中心的な役割を果たしてきた「直流機」。19世紀後半に実用化されて以来、産業界で広く使用されてきた直流発電機と直流電動機は、現代でも特殊な用途において重要な役割を担っています。
直流機は、電気エネルギーと機械的エネルギーを相互に変換する装置で、「直流発電機」として使用する場合は機械的エネルギーを直流電気エネルギーに変換し、「直流電動機」として使用する場合は直流電気エネルギーを機械的エネルギーに変換します。同じ構造の機械が、運転方法によって発電機にも電動機にもなる点が特徴です。
直流機の最大の特長は、その制御性の良さにあります。特に直流電動機は、トルクや速度の制御が容易で広い範囲の速度制御が可能なため、精密な速度制御が必要な用途や、大きな始動トルクが必要な用途で重宝されてきました。近年はパワーエレクトロニクス技術の発展により、交流電動機(特にインバータ制御された誘導電動機や同期電動機)に置き換えられる傾向にありますが、依然として鉄鋼圧延設備や鉱山機械、電気鉄道、クレーンなどの一部の分野では直流電動機が使用されています。



第三種電気主任技術者試験における重要性
直流機に関する知識は、第三種電気主任技術者試験の「機械」科目において重要な出題分野となっています。特に、直流機の基本原理、界磁方式による特性の違い、速度制御方法、始動方法などが頻出します。また、「理論」科目においても電気機器の一部として出題されることがあります。工場設備や自家発電設備の保守・管理を行う電気主任技術者にとって、直流機の知識は必須となります。
この学習ページでは、直流機の基本構造から始まり、動作原理、特性、応用と制御まで、第三種電気主任技術者試験の対策として必要な内容を丁寧に解説していきます。歴史ある直流機の基本原理を理解することで、現代の電気機器全般への理解も深まることでしょう。
基礎理論をさらに深く学習したい方へ
本ページでは直流機の実践的な応用と計算問題を中心に解説していますが、より詳細な理論と体系的な知識を身に付けたい方には、教科書スタイルの詳細解説ページもご用意しています。
📖 【理論編】直流機学習ページ - 第三種電気主任技術者試験対応
電機子反作用、巻線方式、定格項目など理論的側面を詳細に解説した教科書風学習ページ
2. 直流機の基本構造
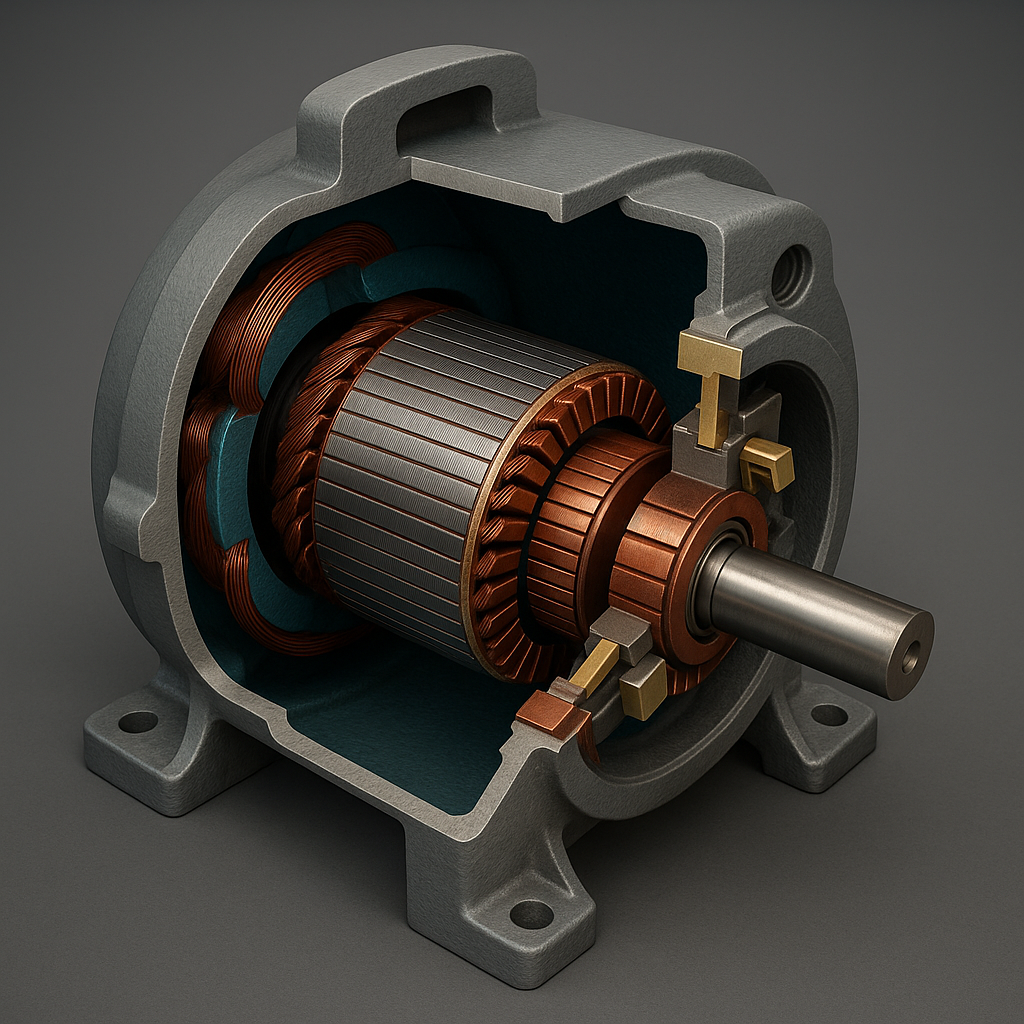
直流機は主に「固定子」と「回転子」から構成されています。ただし、一般的な交流機とは異なり、直流機の電機子(主巻線)は回転子側にあり、界磁は固定子側にあるという特徴があります。
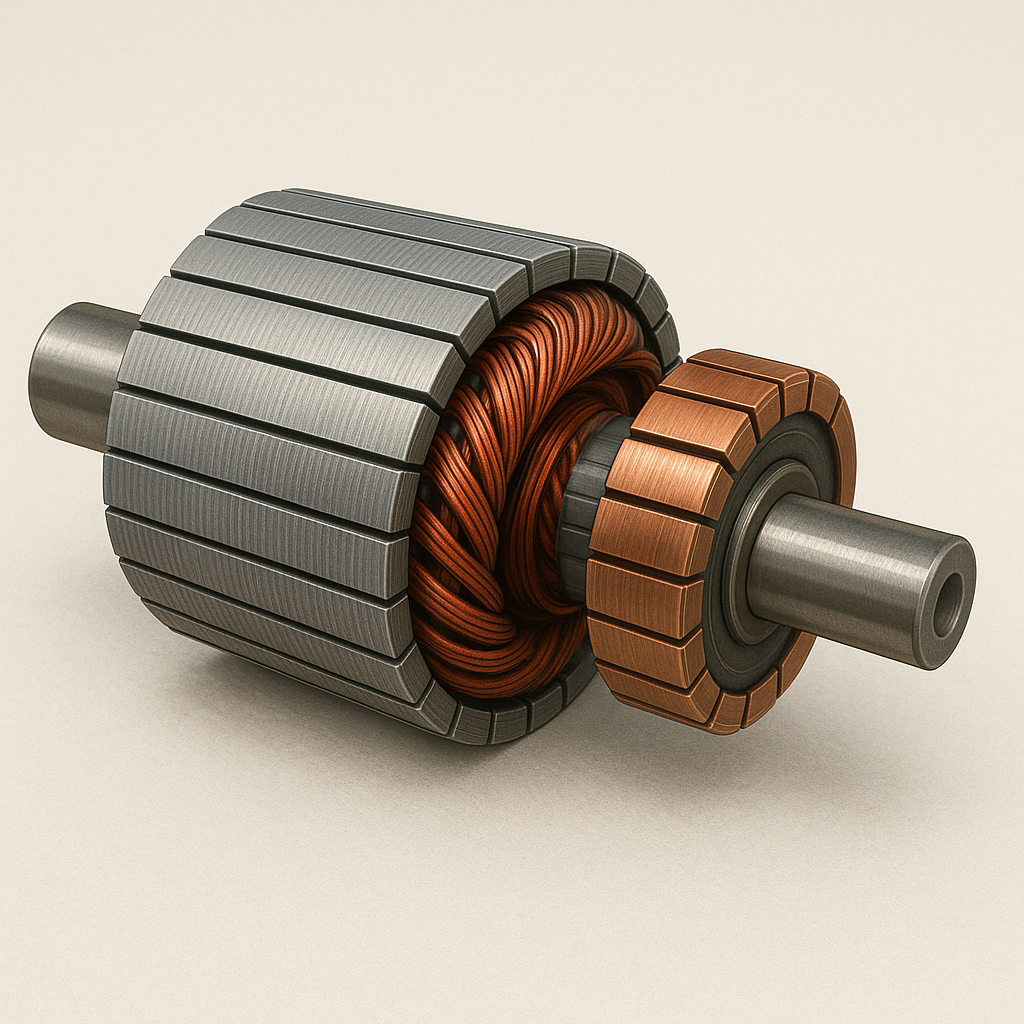
2.1 電機子の構造
電機子は直流機の回転子部分で、主に以下の要素から構成されています:
- 電機子鉄心:珪素鋼板を積層した円筒形の構造物で、スロット(溝)が設けられています
- 電機子巻線:スロットに収められた導体で、通常は重ね巻きまたは波巻きが採用されています
- 整流子:銅製の扇形セグメントを円筒状に配置した構造物で、巻線の端部と接続されています
- 回転軸:電機子全体を支え、機械的出力を伝達するための軸
電機子巻線は閉回路を形成し、複数のコイルが電機子鉄心のスロットに収められています。各コイルは整流子セグメントに接続され、ブラシとの接触によって外部回路と接続されます。
電機子巻線の種類
電機子巻線には主に2種類あります:
- 重ね巻き(ラップ巻き):各コイルの端部が隣接する整流子セグメントに接続される巻き方で、並列回路数が極数に等しくなります。大電流・低電圧機に適しています。
- 波巻き:各コイルの端部が離れた整流子セグメントに接続される巻き方で、並列回路数が常に2となります。小電流・高電圧機に適しています。
また、これらの組み合わせである「複合巻き」も存在します。
電機子鉄心は、渦電流損失を低減するために薄い珪素鋼板を積層して作られています。電機子が回転すると、鉄心は磁界の中で回転するため、渦電流が発生します。積層構造はこの渦電流を抑制する役割を果たします。
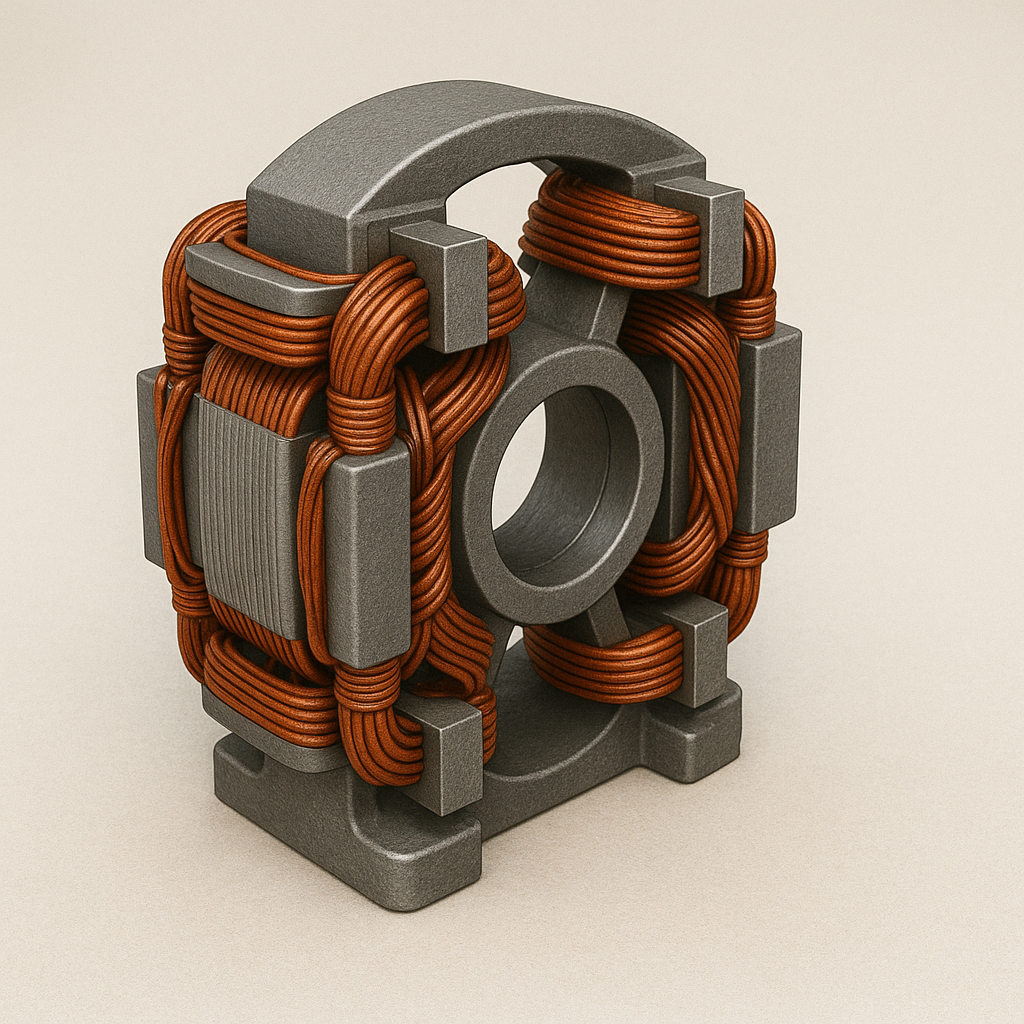
2.2 界磁の構造
界磁は直流機の固定子部分で、主に以下の要素から構成されています:
- 主磁極:電機子に主磁束を供給するための磁極で、鉄心と界磁巻線からなります
- 補極:整流改善のために設けられる小さな磁極で、主磁極間に配置されます
- 補償巻線:電機子反作用を補償するための巻線で、主磁極の表面に配置されます
- ヨーク(磁気回路):磁束の通路となる鉄心部分
界磁巻線に直流電流を流すことで、主磁極が磁化され、電機子に磁束が供給されます。界磁方式によって、直流機の特性が大きく変わります。
界磁方式による分類
直流機は界磁の接続方法により、次のように分類されます:
- 他励式:界磁電流を外部電源から供給する方式
- 分巻式:界磁巻線が電機子と並列に接続される方式
- 直巻式:界磁巻線が電機子と直列に接続される方式
- 複巻式:分巻界磁と直巻界磁の両方を持つ方式
各界磁方式によって、直流機の特性(発電機の外部特性や電動機の速度-トルク特性など)が異なります。
主磁極の数(極数)は直流機の設計によって異なり、2極、4極、6極などがあります。極数が多いほど、同じ回転速度でも整流子セグメント間の電圧が低くなるため、高電圧機では多極構造が採用されることが多いです。
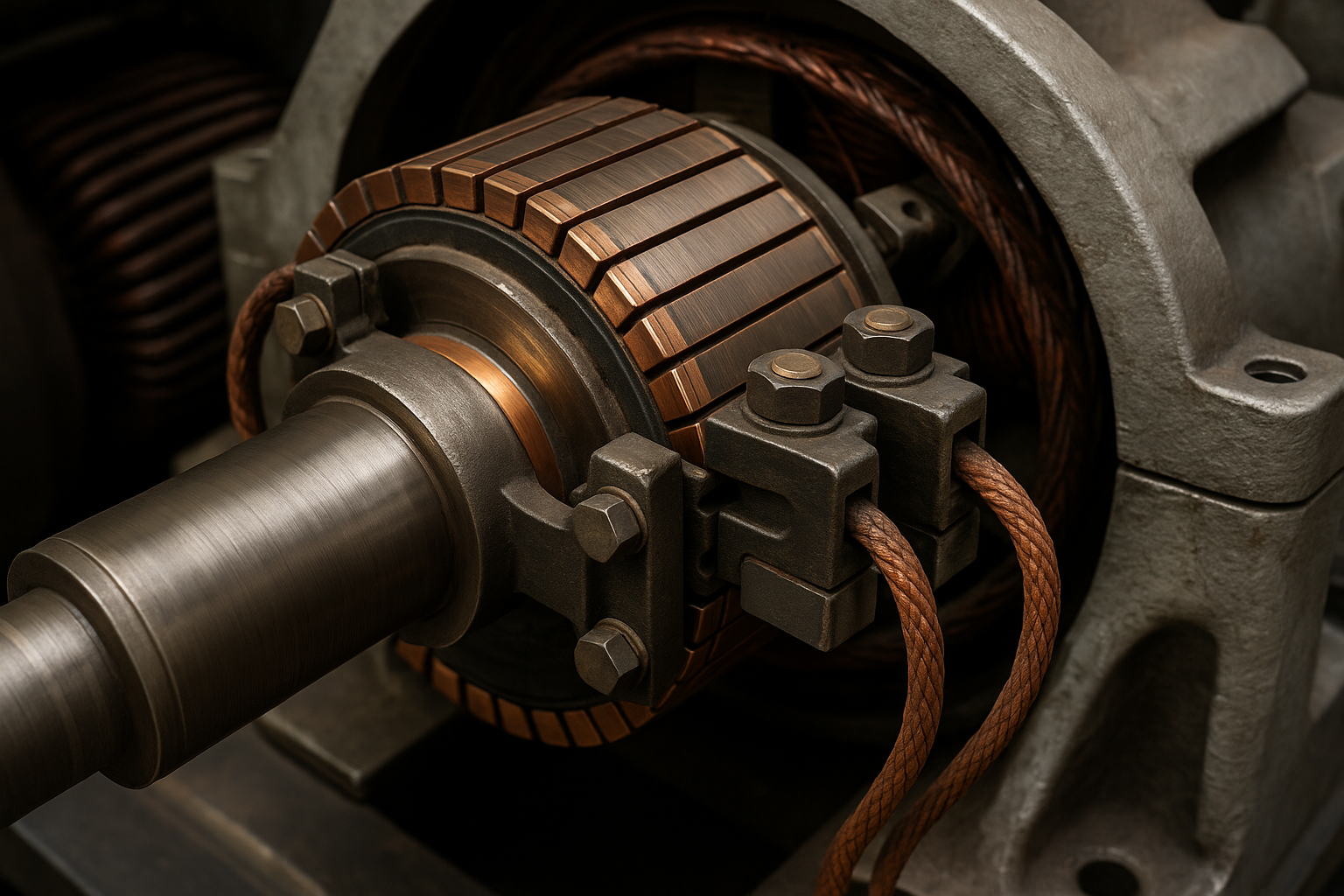
2.3 整流子と整流作用
整流子
発電機では、回転子内で発生する交流的な電圧を機械的に直流に変換し、電動機では、供給された直流電流を回転子内で適切に切り替えて連続的なトルクを発生させる役割を果たします。
整流子は、銅製の扇形セグメントを円筒状に配置し、マイカなどの絶縁物で互いに絶縁した構造になっています。各セグメントは電機子巻線の特定の点に接続されています。
整流作用とは、以下のプロセスを指します:
- 発電機の場合:電機子巻線で発生する交流起電力を、整流子とブラシの組み合わせにより外部回路には直流として取り出す作用
- 電動機の場合:外部から供給される直流電流を、整流子とブラシによって電機子巻線内の電流方向を機械的に切り替え、常に一定方向のトルクを得られるようにする。これにより、電機子内で回転磁界と相互作用する電流が保たれ、連続的な回転運動が生まれる。
整流不良と対策
整流子とブラシの切り替わり時に、コイルに流れる電流が急変すると「整流不良」が発生し、火花(スパーク)が生じます。これは直流機の寿命を縮める大きな要因となります。整流不良を防ぐための主な対策は以下の通りです:
- 補極の設置:主磁極間に補極を設け、整流時のコイルに適切な起電力を誘起させる
- ブラシの材質と位置の最適化:適切な抵抗値を持つブラシ材料の選択と、中性点への正確な配置
- 補償巻線の使用:電機子反作用を補償する巻線を追加する
- 抵抗リード線の使用:コイルと整流子セグメント間に抵抗を挿入する
整流子とブラシの接触面では摩擦が生じるため、摩耗が避けられません。このため、ブラシは定期的な交換が必要な消耗部品となります。また、整流子表面も摩耗や荒れが生じるため、定期的なメンテナンス(整流子の研磨など)が必要です。
2.4 構造による分類
直流機は構造的な特徴によって、いくつかの種類に分類できます:
- 保護方式による分類
- 開放形:外部から直接空気を取り入れて冷却する方式
- 防滴形:上部からの水滴に対して保護された構造
- 全閉形:外部と内部が完全に分離された構造
- 防爆形:爆発性ガスがある環境での使用に適した構造
- 冷却方式による分類
- 自冷式:自然対流による冷却
- 他冷式:ファンなどによる強制冷却
- 冷媒循環式:特殊な冷媒を循環させる冷却方式
- 取り付け方式による分類
- 水平形:軸が水平に取り付けられる形式
- 立形:軸が垂直に取り付けられる形式
直流機の一般的な特性
一般的な直流機の特性は以下の通りです:
- 効率:中~大型機で85~95%程度(小型機はそれより低い)
- 定格電圧:数ボルトから数千ボルトまで様々
- 速度範囲:数百rpmから数千rpmまで様々
- 寿命:適切なメンテナンスを行えば10~20年以上
- 主な消耗部品:ブラシ、軸受
直流機は交流機と比較して、ブラシと整流子の存在により保守が必要ですが、制御性に優れるという特長があります。
実際の直流機の選定では、用途に応じた適切な界磁方式、構造、容量、速度範囲などを考慮する必要があります。特に、電動機の場合は負荷特性に適した界磁方式を選ぶことが重要です。
直流機の基本構造のまとめ
- 直流機は主に電機子(回転子)と界磁(固定子)から構成される
- 電機子は鉄心、巻線、整流子、回転軸からなり、巻線は重ね巻きまたは波巻きが用いられる
- 界磁は主磁極、補極、補償巻線、ヨークからなり、界磁方式により特性が異なる
- 整流子とブラシの組み合わせにより整流作用が行われ、交流⇄直流の変換が実現される
- 界磁方式により、他励式、分巻式、直巻式、複巻式に分類される
- 構造的には保護方式、冷却方式、取り付け方式などにより様々な分類がある
3. 直流機の動作原理
直流機の動作原理は、電磁誘導と電磁力(フレミングの法則)に基づいています。このセクションでは、直流発電機と直流電動機の基本的な動作原理と、電磁現象について解説します。
3.1 直流発電機の原理
直流発電機は、機械的エネルギーを直流電気エネルギーに変換する装置です。その基本原理は以下の通りです:
- 外部から回転力(例:原動機からの機械的トルク)を受けて、電機子が回転します
- 界磁巻線に流れる電流によって、磁極間に磁界が形成されます
- 電機子巻線が磁界を横切って回転することで、電磁誘導により交流起電力が発生します
- この交流起電力は、整流子とブラシの作用により外部回路には直流として取り出されます
発電機の誘導起電力の大きさは、ファラデーの電磁誘導の法則に基づき、次の式で表されます:
ここで:
- \(E\):誘導起電力 [V]
- \(P\):磁極数
- \(Z\):電機子導体総数
- \(n\):回転速度 [rpm]
- \(\Phi\):磁束 [Wb]
- \(A\):並列回路数(重ね巻きでは \(A = P/2\)、波巻きでは \(A = 2\))
この式を簡略化すると、次のように表すこともできます:
ここで \(K_E\) は機械定数(構造によって決まる定数)です。
磁束と回転速度の影響
上記の式から、誘導起電力は磁束と回転速度に比例することがわかります。例えば、4極の直流発電機で、磁束が20%増加すると起電力も20%増加します。同様に、回転速度が1000rpmから1200rpmに増加すると(20%増)、起電力も20%増加します。実際の発電機制御では、界磁電流を調整して磁束を変化させることで、出力電圧を制御します。
3.2 直流電動機の原理
直流電動機は、直流電気エネルギーを機械的エネルギーに変換する装置です。その基本原理は以下の通りです:
- 界磁巻線に流れる電流によって、磁極間に磁界が形成されます
- 外部から電機子巻線に直流電流を供給します(ブラシと整流子を介して)
- 整流子の作用により、電機子内の電流は位置に応じて方向が変わる交流的な分布となります
- 電流が流れる導体と磁界の相互作用により、フレミングの左手の法則に従ってトルクが発生します
- このトルクにより電機子が回転し、機械的出力が得られます
電動機のトルクは、電磁力と回転半径の積で、次の式で表されます:
ここで:
- \(T\):トルク [N·m]
- \(P\):磁極数
- \(Z\):電機子導体総数
- \(\Phi\):磁束 [Wb]
- \(I_a\):電機子電流 [A]
- \(A\):並列回路数
この式を簡略化すると、次のように表すこともできます:
ここで \(K_T\) は機械定数(構造によって決まる定数)です。
電動機の回転方向の制御
直流電動機の回転方向は、次の2つの方法で変更できます:
- 電機子電流の方向を反転:電機子端子の接続を入れ替える
- 界磁電流の方向を反転:界磁端子の接続を入れ替える
ただし、両方同時に反転すると回転方向は変わりません。実際の運用では、電機子電流を反転する方法が一般的です。
3.3 誘導起電力とトルクの関係
直流機が発電機として動作する場合でも、電動機として動作する場合でも、電機子内には常に誘導起電力(逆起電力)が発生します。この誘導起電力とトルクの関係は、電力とエネルギー保存則から導かれます。
電動機として動作する場合、電機子に印加された電圧 \(V\) と誘導起電力 \(E\) の差が実効電圧となり、電機子抵抗 \(R_a\) による電圧降下を引き起こします:
ここで:
- \(V\):端子電圧 [V]
- \(E\):誘導起電力(逆起電力)[V]
- \(I_a\):電機子電流 [A]
- \(R_a\):電機子抵抗 [Ω]
電動機の電気的入力電力は \(V I_a\) で、このうち \(E I_a\) が機械的出力に変換され、\(I_a^2 R_a\) が電機子巻線での銅損となります:
ここで \(E I_a\) は「電磁出力」と呼ばれ、これがトルク \(T\) と角速度 \(\omega\) の積に等しくなります:
\[E I_a = T \omega\]誘導起電力と速度の関係
直流電動機が定格電圧 \(V\) で運転され、無負荷(トルクがほぼゼロ)の状態では、電機子電流 \(I_a\) は非常に小さくなります。この場合、\(V \approx E\) となるため、誘導起電力 \(E\) は端子電圧 \(V\) にほぼ等しくなります。
誘導起電力は速度に比例する(\(E = K_E \Phi n\))ので、無負荷速度は端子電圧にほぼ比例します。例えば、端子電圧が20%低下すると、速度も約20%低下します(界磁が一定の場合)。
3.4 電機子反作用と補償方法
電機子反作用とは、電機子電流によって生じる磁界が主磁界(界磁によって生じる磁界)に影響を与える現象です。主な影響は以下の通りです:
- 主磁界の歪み:電機子反作用による磁界が主磁界と合成されることで、合成磁界が歪む
- 中性軸の移動:理論的な中性軸(磁束密度がゼロとなる位置)が幾何学的中性軸からずれる
- 整流不良:中性軸のずれにより、コイルが短絡される位置が最適でなくなり、整流時に火花が発生する
- 磁束の減少:電機子反作用による磁界が主磁界を弱める方向に作用する場合、有効磁束が減少する
電機子反作用の影響を軽減するための主な対策は以下の通りです:
- 補極の設置:主磁極間に補極(または整流極)を設け、整流時のコイルに適切な起電力を誘起させる
- 補償巻線:主磁極の表面に、電機子電流と逆方向の電流を流す巻線を配置し、電機子反作用による磁界を打ち消す
- ブラシ位置の調整:負荷に応じてブラシ位置を調整し、実際の中性軸に合わせる(現代の機械では固定位置が一般的)
補極の作用
補極は主磁極間に配置される小さな磁極で、電機子電流と同じ方向の電流が流れる巻線が施されています。補極の主な役割は、コイルが短絡される領域(ブラシの下を通過する際)に、適切な回復電圧を誘起することです。この回復電圧は、短絡コイルの電流を整流時間内にスムーズに反転させる役割を果たし、火花の発生を抑制します。特に大型機や高速機では、補極は不可欠な要素となっています。
直流機の動作原理のまとめ
- 直流発電機は機械的エネルギーを直流電気エネルギーに変換し、起電力は \(E = K_E \Phi n\) で表される
- 直流電動機は直流電気エネルギーを機械的エネルギーに変換し、トルクは \(T = K_T \Phi I_a\) で表される
- 誘導起電力(逆起電力)は常に発生し、電動機では \(V - E = I_a R_a\) の関係がある
- 電磁出力は \(E I_a = T \omega\) で表され、エネルギー保存則に基づいている
- 電機子反作用は磁界の歪みや中性軸の移動を引き起こし、整流不良の原因となる
- 電機子反作用の対策として、補極、補償巻線、ブラシ位置の調整などが用いられる
4. 直流機の特性
直流機の性能を理解するためには、その特性を知ることが重要です。このセクションでは、直流発電機と直流電動機の特性、効率と損失、電力変換の流れについて解説します。
4.1 直流発電機の特性
直流発電機の主要な特性は、「外部特性」と呼ばれる負荷電流に対する端子電圧の関係です。界磁方式によって特性が大きく異なります:
- 他励発電機:界磁電流が外部から供給され、一定に保たれる発電機
- 負荷電流の増加とともに端子電圧が直線的に低下する特性
- 電圧降下の主な原因は、電機子抵抗による電圧降下と電機子反作用
- 電圧調整が容易で安定した電源として使用される
- 分巻発電機:界磁巻線が出力端子に並列に接続される発電機
- 負荷電流の増加とともに端子電圧が低下する特性
- 端子電圧の低下により界磁電流も減少するため、他励式より電圧降下が大きい
- 安定した電圧を必要とする用途に適するが、電圧調整器が必要
- 直巻発電機:界磁巻線が出力端子に直列に接続される発電機
- 負荷電流の増加とともに最初は端子電圧が上昇し、その後飽和して低下する特性
- 負荷電流が増加すると界磁電流も増加するため、初期の電圧上昇が生じる
- 定電圧源としては不適だが、負荷電流に比例した電圧が必要な用途に使用
- 複巻発電機:分巻界磁と直巻界磁の両方を持つ発電機
- 累積複巻:直巻界磁が分巻界磁を強める方向に接続され、負荷変動に対して安定した電圧を維持
- 差動複巻:直巻界磁が分巻界磁を弱める方向に接続され、特殊な用途に使用
発電機の端子電圧と誘導起電力の関係:
\[V = E - I_a R_a\]ここで:
- \(V\):端子電圧 [V]
- \(E\):誘導起電力 [V]
- \(I_a\):電機子電流 [A]
- \(R_a\):電機子抵抗 [Ω]
電圧変動率
発電機の電圧特性を表す指標として「電圧変動率」があります。これは、無負荷時の端子電圧と全負荷時の端子電圧の差を全負荷時の端子電圧で割った値として定義されます:
ここで、\(V_{no}\)は無負荷時の端子電圧、\(V_{fl}\)は全負荷時の端子電圧です。電圧変動率が小さいほど、負荷変動に対する電圧安定性が高いことを示します。一般的な他励発電機の電圧変動率は5〜10%程度、分巻発電機では10〜20%程度です。
4.2 直流電動機の特性
直流電動機の主要な特性は、「速度-トルク特性」と呼ばれる出力トルクに対する回転速度の関係です。界磁方式によって特性が大きく異なります:
- 他励電動機:界磁電流が外部から供給され、一定に保たれる電動機
- トルクの増加とともに速度がわずかに低下する特性(ほぼ定速特性)
- 速度低下の主な原因は電機子抵抗による電圧降下
- 広範囲の速度制御が可能で、精密な速度制御が必要な用途に適する
- 分巻電動機:界磁巻線が電源に並列に接続される電動機
- 他励電動機とほぼ同様の特性(若干速度低下が大きい)
- 定速運転が必要な工作機械、送風機などに適する
- 直巻電動機:界磁巻線が電機子と直列に接続される電動機
- トルクの減少とともに速度が急激に上昇する特性(可変速特性)
- トルクが電機子電流の二乗に比例する領域があり、大きな始動トルクを発生
- 無負荷時に暴走(過速度)の危険性があるため、常に負荷と結合して使用
- 電気鉄道、巻上機、クレーンなど、大きな始動トルクと可変速特性が必要な用途に適する
- 複巻電動機:分巻界磁と直巻界磁の両方を持つ電動機
- 累積複巻:直巻と分巻の特性の中間的な特性を示し、始動トルクと速度安定性のバランスが良い
- 差動複巻:負荷増加時に速度が上昇する特性を示し、特殊な用途に使用
電動機の速度式:
\[n = \frac{V - I_a R_a}{K_E \Phi}\]ここで:
- \(n\):回転速度 [rpm]
- \(V\):端子電圧 [V]
- \(I_a\):電機子電流 [A]
- \(R_a\):電機子抵抗 [Ω]
- \(K_E\):機械定数
- \(\Phi\):磁束 [Wb]
速度制御の原理
上記の速度式から、直流電動機の速度制御には次の3つの方法があることがわかります:
- 電機子電圧制御:端子電圧 \(V\) を変化させる方法
- 界磁制御:界磁電流を変化させて磁束 \(\Phi\) を調整する方法
- 電機子抵抗制御:電機子回路に抵抗を挿入して \(R_a\) を増加させる方法
これらの方法は、後述の「速度制御法」で詳しく解説します。
4.3 効率と損失
直流機の効率は、出力電力に対する入力電力の比率で定義されます:
発電機の効率:
\[\eta = \frac{P_{out}}{P_{in}} = \frac{VI}{P_{in}} = \frac{VI}{VI + P_{loss}}\]電動機の効率:
\[\eta = \frac{P_{out}}{P_{in}} = \frac{T\omega}{VI} = \frac{T\omega}{T\omega + P_{loss}}\]ここで、\(P_{loss}\) は全損失を表します。
直流機の主な損失には、以下のものがあります:
- 銅損:電流によって生じる抵抗損失
- 電機子銅損:\(P_{a} = I_a^2 R_a\)
- 界磁銅損:\(P_{f} = I_f^2 R_f\)
- 鉄損:磁束の変化によって鉄心に生じる損失
- ヒステリシス損:鉄心の磁化曲線のヒステリシスによる損失
- 渦電流損:鉄心内に誘導される渦電流による損失
- 機械損:機械的な摩擦や風損
- 軸受損:軸受の摩擦による損失
- ブラシ摩擦損:ブラシと整流子の接触面での摩擦による損失
- 風損:回転子の空気抵抗による損失
- その他の損失
- 整流損:整流時の火花などによる損失
- 漂遊負荷損:負荷に依存する追加損失
効率計算の例
定格出力10kW、定格電圧100V、定格電流110Aの直流電動機がある。この電動機の無負荷試験では、端子電圧100V、電流5Aで運転された。また、電機子抵抗は0.1Ωである。この電動機の定格負荷時の効率を求める。
【解答】
無負荷試験での入力電力は \(P_0 = 100 \times 5 = 500\mathrm{W}\) となり、これが鉄損と機械損の合計と考えられる。
定格負荷時の銅損は \(P_c = I_a^2 R_a = 110^2 \times 0.1 = 1210\mathrm{W}\) となる。
よって、定格負荷時の効率は:
実際の直流機の効率は、容量によって異なりますが、大型機では90%以上、中型機では85~90%、小型機では70~85%程度となります。
4.4 電力変換の流れ
直流機における電力変換の流れを理解することは、効率や損失の考え方を深めるために重要です。
直流発電機の電力変換の流れ:
- 機械的入力:原動機からのトルク \(\times\) 角速度 = 機械的入力電力
- 機械損の損失:摩擦、風損などによる損失
- 電磁変換:残りの電力が電磁力によって電気エネルギーに変換
- 鉄損の損失:ヒステリシス損、渦電流損などによる損失
- 電機子内部での発生電力:誘導起電力 \(\times\) 電機子電流
- 銅損の損失:電機子巻線、界磁巻線での抵抗損失
- 電気的出力:端子電圧 \(\times\) 出力電流 = 電気的出力電力
直流電動機の電力変換の流れ:
- 電気的入力:端子電圧 \(\times\) 入力電流 = 電気的入力電力
- 銅損の損失:電機子巻線、界磁巻線での抵抗損失
- 電機子内部での変換電力:誘導起電力 \(\times\) 電機子電流
- 鉄損の損失:ヒステリシス損、渦電流損などによる損失
- 電磁変換:残りの電力が電磁力によって機械エネルギーに変換
- 機械損の損失:摩擦、風損などによる損失
- 機械的出力:出力トルク \(\times\) 角速度 = 機械的出力電力
負荷率と効率の関係
直流機の効率は負荷率(定格負荷に対する実際の負荷の比率)によって変化します。一般に、鉄損と機械損はほぼ一定で、銅損は負荷電流の二乗に比例します。このため、低負荷時には固定損失(鉄損と機械損)の影響が大きく、高負荷時には銅損の影響が大きくなります。
最大効率となる負荷率は、一般的に次の条件で与えられます:
\[\text{可変損失(銅損)= 固定損失(鉄損+機械損)}\]大型機では最大効率となる負荷率は75〜85%程度ですが、実際の運用では定格負荷近くでの運転が多く、効率のわずかな低下よりも容量の有効利用が優先されます。
直流機の特性のまとめ
- 直流発電機の外部特性は界磁方式によって大きく異なる(他励式、分巻式、直巻式、複巻式)
- 直流電動機の速度-トルク特性も界磁方式によって異なり、用途に応じた選定が重要
- 直流機の主な損失には、銅損、鉄損、機械損、整流損などがある
- 効率は出力と入力の比率で定義され、大型機ほど高効率
- 電力変換の流れを理解することで、損失の発生箇所と効率向上の方策を把握できる
- 最大効率となる負荷率は、固定損失と可変損失が等しくなる点
5. 直流機の応用と制御
直流機は、その優れた制御性から様々な産業分野で応用されています。このセクションでは、直流発電機と直流電動機の代表的な応用例と、速度制御法、始動方法について解説します。
5.1 直流発電機の応用
直流発電機は、交流を直流に変換する半導体整流器の発展により、主電源としての用途は減少していますが、以下のような特殊用途で依然として使用されています:
- 電気めっき、電解用電源:安定した直流を供給するために使用
- 溶接機用電源:アーク溶接用の直流電源として使用
- 励磁用電源:同期発電機などの界磁電流を供給するために使用
- 蓄電池の充電:自動車や船舶などの蓄電池充電用に使用
- 制御用補助電源:自家発電設備の始動用や制御用電源として使用
- タコジェネレータ:回転速度を検出するセンサーとして使用
直流発電機の制御
直流発電機の出力電圧は、主に界磁電流を調整することで制御されます。他励発電機や分巻発電機では、界磁回路に可変抵抗器(界磁抵抗器)を直列に接続し、界磁電流を調整することで出力電圧を制御します。自動電圧調整器(AVR)を用いれば、負荷変動に対して自動的に出力電圧を一定に保つことが可能です。
例えば、125kW 250V 500Aの発電機で、無負荷時に250Vを得るには界磁電流を5A流す必要があるとします。全負荷時に同じ電圧を維持するには、電機子反作用の影響を補償するため、界磁電流を7Aに増加させる必要があります。
現代では、多くの直流電源が半導体整流器(ダイオード、サイリスタなど)によって交流から変換されるようになり、直流発電機の使用は限定的になっています。ただし、特殊環境での使用や、直流電動機とセットで使用されるワードレオナード方式などでは、依然として直流発電機が使われています。
5.2 直流電動機の応用
直流電動機は、その優れた制御性から様々な産業分野で応用されています。界磁方式によって特性が異なるため、用途に応じた選定が重要です:
- 他励電動機および分巻電動機
- 工作機械駆動:旋盤、フライス盤、ボール盤など
- 巻線機:電線、紙、フィルムなどの巻取り
- 精密送り装置:印刷機、紡績機など
- 可変速ポンプ・送風機:定速性が求められる用途
- 直巻電動機
- 電気鉄道:電車、路面電車などの走行用モーター
- クレーン・巻上機:重量物の巻上げや横行
- 電気自動車:走行用モーター(現在はインバータ駆動のACモーターが主流)
- トロリーバス:バス用駆動モーター
- 複巻電動機
- 圧延機駆動:鉄鋼圧延ラインなど
- シャーリング装置:金属板の切断
- エレベーター:乗客輸送用昇降機
- 押出機:プラスチック成形など
直流電動機の特長と限界
直流電動機の主な特長は以下の通りです:
- 幅広い速度制御範囲(1:100以上も可能)
- 良好な始動特性(特に直巻電動機)
- 精密な速度制御が可能
- 大きなトルクを発生可能
一方、以下のような限界もあります:
- 整流子とブラシの存在による保守の必要性
- 火花の発生による爆発性雰囲気での使用制限
- 大型高速機の製作が困難
- 製造コストが高い
これらの限界から、現代ではパワーエレクトロニクス技術の発展により、インバータ制御された交流電動機に置き換えられる傾向にあります。
5.3 速度制御法
直流電動機の回転速度は、次の式で表されます:
この式から、直流電動機の速度を制御する主な方法は以下の3つになります:
- 電機子電圧制御法:電機子電圧 \(V\) を変化させる方法
- 抵抗電圧降下法:電機子回路に可変抵抗器を直列に挿入し、実効的な電機子電圧を下げる方法
- 可変電圧供給法:発電機や電力変換器を用いて、電機子に可変の電圧を供給する方法
- サイリスタ制御法:SCR(サイリスタ)を用いた電力変換器で電機子電圧を制御する方法
- チョッパ制御法:直流電圧をパルス幅変調(PWM)して平均電圧を制御する方法
- 界磁抵抗制御法:界磁回路に可変抵抗器を挿入し、界磁電流を調整する方法
- 界磁電圧制御法:界磁巻線に供給する電圧を変化させる方法
- 他励界磁制御法:独立した電源から界磁電流を供給し制御する方法
- 主に小型電動機や特殊用途に使用され、効率が低いため一般的ではない
| 制御方法 | 速度範囲 | 効率 | 特徴 |
|---|---|---|---|
| 電機子電圧制御 | 定格速度以下 | 良好 | 定トルク運転可能、速度安定性良好 |
| 界磁制御 | 定格速度以上 | 良好 | 定出力運転、高速域で磁束低下 |
| 電機子抵抗制御 | 定格速度以下 | 低い | 簡易で低コスト、速度安定性不良 |
ワードレオナード方式
ワードレオナード方式は、直流発電機と直流電動機を組み合わせた速度制御システムです。交流電動機で駆動される直流発電機の界磁電流を調整することで、直流電動機に供給される電圧を制御します。この方式は、広範囲の速度制御と優れた応答性を持ち、鉱山の巻上機や大型クレーン、製鉄所の圧延機など大電力が必要な用途で使用されてきました。現代では、パワーエレクトロニクスの発展により、サイリスタ制御方式に置き換えられることが多くなっています。
5.4 始動方法
直流電動機の始動時には、電機子に大きな電流が流れる可能性があります。これは、始動時には逆起電力がほぼゼロであり、電機子に印加される電圧がそのまま電機子抵抗による電流を決定するためです。この大電流を制限するために、様々な始動方法が用いられます:
- 直入れ始動法:電源を直接電機子に接続する方法
- 小型電動機(数kW程度まで)に適用
- 始動電流が大きいため、大型機には不適
- 始動抵抗器による始動法:電機子回路に抵抗器を直列に挿入し、始動時の電流を制限する方法
- 最も一般的な始動方法
- 回転速度の上昇に伴って抵抗を段階的に短絡
- 自動式と手動式がある
- 電圧調整による始動法:電機子電圧を低くして始動し、徐々に上げる方法
- 可変電圧装置(ワードレオナード方式など)が必要
- スムーズな始動が可能
- サイリスタ始動法:サイリスタ(SCR)を用いた電力変換器で電機子電圧を制御する方法
- 現代的な始動方法
- 始動電流を任意に制御可能
- ソフトスタートが可能
始動抵抗器の設計
始動抵抗器は、始動時の電流を定格電流の1.5〜2.5倍程度に制限するように設計されます。回転速度が上昇して逆起電力が発生すると、抵抗値を段階的に減少させていきます。通常3〜5段階の抵抗値を持ち、各段の電流が同じになるように設計されます。例えば、定格電圧が200V、定格電流が50A、電機子抵抗が0.2Ωの電動機で、始動電流を定格の2倍(100A)に制限する場合、始動抵抗の初期値は:
となります。
直流電動機の始動順序の一例:
- 始動抵抗器を最大値にセット
- 界磁回路に電流を流す(界磁を確立)
- 電機子回路のスイッチを入れる(始動開始)
- 電動機が加速するのに合わせて始動抵抗を徐々に減らす
- 始動抵抗をすべて短絡し、定常運転に移行
始動時のトルク特性
直流電動機の始動トルクは、界磁方式によって異なります:
- 他励および分巻電動機:始動トルクは電機子電流に比例し、定格トルクの1.5〜2.5倍程度
- 直巻電動機:始動トルクは電機子電流の二乗に比例し、定格トルクの3〜5倍程度
- 複巻電動機:他励と直巻の中間的な特性
大きな始動トルクが必要な用途(クレーン、巻上機、電気鉄道など)では、直巻または複巻電動機が適しています。
直流機の応用と制御のまとめ
- 直流発電機は特殊電源として使用され、界磁制御で出力電圧を調整する
- 直流電動機は界磁方式によって特性が異なり、用途に応じた選定が重要
- 速度制御法には、電機子電圧制御、界磁制御、電機子抵抗制御がある
- 電機子電圧制御は定格速度以下、界磁制御は定格速度以上の速度範囲に適する
- 始動方法には、直入れ始動、始動抵抗器による始動、電圧調整による始動、サイリスタ始動などがある
- 始動抵抗器は始動電流を制限するために使用され、段階的に短絡される
- 直巻電動機は大きな始動トルクを発生し、クレーンや電気鉄道に適している
6. 演習問題
6.1 基本計算問題
問題1:直流発電機の誘導起電力の計算
4極、波巻、電機子導体数800本の直流発電機がある。磁束が0.015Wbで、回転速度が1200rpmのとき、発生する誘導起電力を求めよ。
解答:
直流発電機の誘導起電力は次の式で計算できます:
\[E = \frac{PZn\Phi}{60A}\]ここで:
- \(P\):磁極数 = 4
- \(Z\):電機子導体総数 = 800
- \(n\):回転速度 = 1200 rpm
- \(\Phi\):磁束 = 0.015 Wb
- \(A\):並列回路数(波巻きでは \(A = 2\))
これらの値を式に代入すると:
\begin{align*} E &= \frac{PZn\Phi}{60A} \\[10pt] &= \frac{4 \times 800 \times 1200 \times 0.015}{60 \times 2} \\[10pt] &= \frac{4 \times 800 \times 1200 \times 0.015}{120} \\[10pt] &= \frac{57600 \times 0.015}{120} \\[10pt] &= \frac{864}{120} \\[10pt] &= 7.2 \, \mathrm{V} \times 10 \\[10pt] &= 72 \, \mathrm{V} \end{align*}したがって、発生する誘導起電力は72Vです。
注:波巻きの場合、並列回路数 \(A = 2\) となります。重ね巻きの場合は \(A = P/2 = 2\) となります。この問題では波巻きなので \(A = 2\) を使用しました。
問題2:直流電動機の速度計算
分巻直流電動機が200Vの電源に接続されている。電機子抵抗が0.5Ω、電機子電流が40A、界磁巻線が作る磁束が0.02Wbであるとき、回転速度を求めよ。また、電機子電流が60Aになった場合の回転速度を求めよ。ただし、機械定数 \(K_E = 0.8\) とする。
解答:
直流電動機の速度式は次の通りです:
\[n = \frac{V - I_a R_a}{K_E \Phi}\]ここで:
- \(V\):端子電圧 = 200 V
- \(I_a\):電機子電流 = 40 A(または60 A)
- \(R_a\):電機子抵抗 = 0.5 Ω
- \(K_E\):機械定数 = 0.8
- \(\Phi\):磁束 = 0.02 Wb
(1) 電機子電流が40Aの場合:
\begin{align*} n &= \frac{V - I_a R_a}{K_E \Phi} \\[10pt] &= \frac{200 - 40 \times 0.5}{0.8 \times 0.02} \\[10pt] &= \frac{200 - 20}{0.016} \\[10pt] &= \frac{180}{0.016} \\[10pt] &= 11250 \, \mathrm{rpm} \end{align*}(2) 電機子電流が60Aの場合:
\begin{align*} n &= \frac{V - I_a R_a}{K_E \Phi} \\[10pt] &= \frac{200 - 60 \times 0.5}{0.8 \times 0.02} \\[10pt] &= \frac{200 - 30}{0.016} \\[10pt] &= \frac{170}{0.016} \\[10pt] &= 10625 \, \mathrm{rpm} \end{align*}したがって、電機子電流が40Aのときの回転速度は11250rpm、電機子電流が60Aのときの回転速度は10625rpmです。
負荷電流が増加すると、電機子抵抗による電圧降下が増加し、速度が低下することがわかります。これは分巻電動機の典型的な特性です。
問題3:直流電動機の効率と損失
直流電動機が220V、50Aで運転され、出力軸のトルクは80N·m、回転速度は1000rpmである。この電動機の効率と損失を求めよ。
解答:
(1) まず、電動機の入力電力を計算します:
\begin{align*} P_{in} &= VI \\[10pt] &= 220 \times 50 \\[10pt] &= 11000 \, \mathrm{W} \\[10pt] &= 11 \, \mathrm{kW} \end{align*}(2) 次に、出力軸の機械的出力を計算します。機械的出力はトルクと角速度の積です:
\begin{align*} P_{out} &= T \omega \\[10pt] &= T \times \frac{2\pi n}{60} \\[10pt] &= 80 \times \frac{2\pi \times 1000}{60} \\[10pt] &= 80 \times \frac{2\pi \times 1000}{60} \\[10pt] &= 80 \times \frac{6283.2}{60} \\[10pt] &= 80 \times 104.72 \\[10pt] &= 8377.6 \, \mathrm{W} \\[10pt] &\approx 8.38 \, \mathrm{kW} \end{align*}(3) 効率は出力を入力で割ることで求められます:
\begin{align*} \eta &= \frac{P_{out}}{P_{in}} \times 100\% \\[10pt] &= \frac{8.38}{11} \times 100\% \\[10pt] &= 76.2\% \end{align*}(4) 損失は入力から出力を引くことで求められます:
\begin{align*} P_{loss} &= P_{in} - P_{out} \\[10pt] &= 11 - 8.38 \\[10pt] &= 2.62 \, \mathrm{kW} \end{align*}したがって、この電動機の効率は76.2%で、損失は2.62kWです。
この損失には、電機子銅損、界磁銅損、鉄損、機械損などが含まれています。効率76.2%は中型の直流電動機としては標準的な値です。
6.2 過去問題
問題4:直流電動機の界磁制御(第三種電気主任技術者試験 類似問題)
直流分巻電動機が定格電圧220V、定格速度1200rpmで運転されている。この電動機の速度を1800rpmに上げるために界磁電流を調整したところ、界磁電流は定格の60%になった。このとき、電動機の出力トルクは定格の何%になるか。ただし、電機子抵抗による電圧降下は無視できるものとする。
解答:
直流電動機の速度式は次の通りです:
\[n = \frac{V - I_a R_a}{K_E \Phi}\]電機子抵抗による電圧降下を無視すると:
\[n = \frac{V}{K_E \Phi}\]磁束 \(\Phi\) は界磁電流にほぼ比例します(磁気飽和領域でなければ)。界磁電流が定格の60%になると、磁束も定格の60%になります。
速度と磁束の関係は次のようになります:
\[n \propto \frac{1}{\Phi}\]また、トルクは次の式で表されます:
\[T = K_T \Phi I_a\]以上の関係を用いて計算します。
(1) 速度の変化と磁束の変化の関係:
\[\frac{n_2}{n_1} = \frac{\Phi_1}{\Phi_2}\] \[\frac{1800}{1200} = \frac{\Phi_1}{\Phi_2}\] \[1.5 = \frac{\Phi_1}{\Phi_2}\]磁束の比は:
\[\frac{\Phi_2}{\Phi_1} = \frac{1}{1.5} = \frac{2}{3} \approx 0.667\]これは界磁電流の比60%(0.6)と近いですが、正確には \(\Phi_2 = 0.6 \Phi_1\) です。
(2) トルクと磁束、電機子電流の関係:
\[T \propto \Phi I_a\]速度制御を行う際、電力(トルク × 角速度)がほぼ一定と仮定すると:
\[T_1 \omega_1 = T_2 \omega_2\] \[T_1 \times n_1 = T_2 \times n_2\] \[\frac{T_2}{T_1} = \frac{n_1}{n_2} = \frac{1200}{1800} = \frac{2}{3} \approx 0.667\]また、トルクと磁束、電機子電流の関係から:
\[\frac{T_2}{T_1} = \frac{\Phi_2 I_{a2}}{\Phi_1 I_{a1}} = \frac{0.6 \Phi_1 \times I_{a2}}{\Phi_1 \times I_{a1}} = 0.6 \times \frac{I_{a2}}{I_{a1}}\]ここで、\(\frac{T_2}{T_1} = \frac{2}{3}\) であることから:
\[\frac{2}{3} = 0.6 \times \frac{I_{a2}}{I_{a1}}\] \[\frac{I_{a2}}{I_{a1}} = \frac{2/3}{0.6} = \frac{2}{1.8} = \frac{10}{9} \approx 1.111\]電機子電流は約11.1%増加します。
(3) 出力トルクの計算:
上記の計算から、出力トルクは定格の \(\frac{2}{3} \times 100\% = 66.7\%\) になります。
したがって、界磁制御によって速度を1200rpmから1800rpmに上げると、出力トルクは定格の約66.7%になります。
これは「定出力制御範囲」と呼ばれる運転領域での特性で、トルクが速度に反比例し、出力(トルク × 速度)がほぼ一定になる特性です。
問題5:直流電動機の始動抵抗(第三種電気主任技術者試験 類似問題)
定格電圧100V、定格電流50A、電機子抵抗0.2Ωの直流他励電動機がある。始動時の電流を定格電流の2倍に制限するために必要な始動抵抗値を求めよ。また、この始動抵抗を2段に分け、各段での電流が等しくなるようにするとき、各段の抵抗値を求めよ。
解答:
(1) 始動時に電流を定格電流の2倍(100A)に制限するために必要な始動抵抗値:
始動時には逆起電力がほぼゼロであるため、オームの法則より:
\[I_{start} = \frac{V}{R_{total}}\]ここで、\(R_{total} = R_a + R_{start}\) は電機子抵抗と始動抵抗の合計です。
これを \(R_{start}\) について解きます:
\[100 = \frac{100}{0.2 + R_{start}}\] \[100 \times (0.2 + R_{start}) = 100\] \[0.2 + R_{start} = 1\] \[R_{start} = 1 - 0.2 = 0.8 \, \Omega\]したがって、必要な始動抵抗値は0.8Ωです。
(2) 始動抵抗を2段に分け、各段での電流が等しくなるようにする場合:
2段構成の始動抵抗を \(R_1\) と \(R_2\) とします(\(R_1 > R_2\))。まず、第1段階での電流は100Aで、このときの抵抗は:
\[R_{total,1} = R_a + R_1 = 0.2 + R_1 = \frac{100}{100} = 1 \, \Omega\] \[R_1 = 1 - 0.2 = 0.8 \, \Omega\]第2段階に移行する際、電動機はある程度加速し、逆起電力 \(E\) が発生します。各段の電流を等しくするためには、次の条件を満たす必要があります:
\[I_2 = I_1 = 100 \, \mathrm{A}\]第2段階では:
\[I_2 = \frac{V - E}{R_a + R_2}\]ここで、\(E\) は未知ですが、第1段階から第2段階への移行条件から求めることができます。第1段階の終了時(第2段階の開始時):
\[I_1 = \frac{V - E}{R_a + R_1}\] \[100 = \frac{100 - E}{0.2 + 0.8}\] \[100 = \frac{100 - E}{1}\] \[100 - E = 100\] \[E = 0\]この結果は、第1段階と第2段階の間での逆起電力の増加を無視していることを示しています。実際には、電動機が加速するにつれて逆起電力が発生します。
より現実的な解析では、第2段階での逆起電力を考慮する必要があります。簡略化のため、第2段階での速度を定格速度の約1/3と仮定し、逆起電力を定格電圧の1/3である約33Vとします。
第2段階の抵抗値は:
\[100 = \frac{100 - 33}{0.2 + R_2}\] \[100 \times (0.2 + R_2) = 67\] \[0.2 + R_2 = 0.67\] \[R_2 = 0.67 - 0.2 = 0.47 \, \Omega\]したがって、2段始動抵抗の各段の値は:
- 第1段:\(R_1 = 0.8 \, \Omega\)
- 第2段:\(R_2 = 0.47 \, \Omega\)
実際の始動抵抗器の設計では、電動機の加速特性や負荷トルクなどを考慮して、より詳細な計算が必要です。また、始動抵抗の切替えタイミングは、電流値や速度によって決定されます。
演習問題のポイント
- 直流機の基本式(誘導起電力、速度、トルクなど)を正確に理解し使用すること
- 単位変換(特に角速度の計算)に注意すること
- 効率や損失の計算では、入力と出力の関係を明確にすること
- 界磁制御では、磁束と速度、トルクの関係を理解すること
- 始動抵抗の計算では、逆起電力の影響を考慮すること
- 複段の始動抵抗では、各段での電流条件を考慮すること
まとめ
本ページでは、第三種電気主任技術者試験の重要分野である「直流機」について学習しました。直流機の基本構造から動作原理、特性、応用と制御まで、幅広く解説しています。直流機は現代ではインバータ制御された交流機に置き換えられる傾向にありますが、その優れた制御性から特定の用途では依然として使用されており、また電気機器の基本原理を理解する上で重要な知識となっています。
本ページの内容をしっかりと理解し、演習問題を繰り返し解くことで、試験での得点力向上につながります。また、実務においても直流機の選定や運用、トラブルシューティングに役立つ知識となるでしょう。
学習のポイント
直流機の学習で特に重要な点は以下の通りです:
- 整流子とブラシの役割と整流作用のメカニズムを理解する
- 界磁方式(他励、分巻、直巻、複巻)による特性の違いを比較できる
- 誘導起電力、トルク、速度の関係式とその物理的意味を理解する
- 電機子反作用の影響と補償方法を理解する
- 速度制御法の種類と特徴、適用範囲を把握する
- 始動時の問題と対策を理解する
- 直流機の損失と効率の計算ができる