【理論】令和6年 (下期) 問18|演算増幅器(オペアンプ)の特徴と直流増幅回路の計算問題
演算増幅器(オペアンプ)について,次の (a) 及び (b) の問に答えよ。
(a) 演算増幅器の特徴に関する記述として,誤っているものを次の (1) ~ (5) のうちから一つ選べ。
(1) アナログ \( \mathrm{IC} \) の一種である。
(2) 入力インピーダンスが小さくて出力インピーダンスが大きい。
(3) 反転並びに非反転の二つの入力端子と一つの出力端子がある。
(4) 入力端子間の電圧のみを増幅して出力する。
(5) 増幅度が非常に大きい。
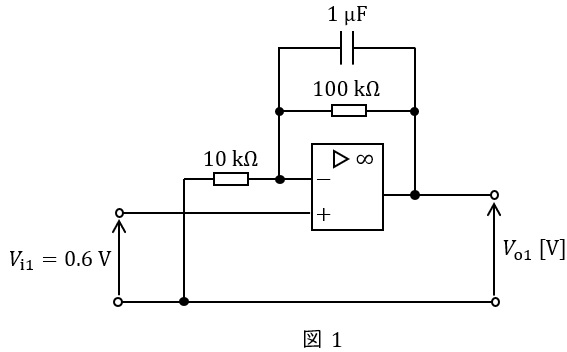
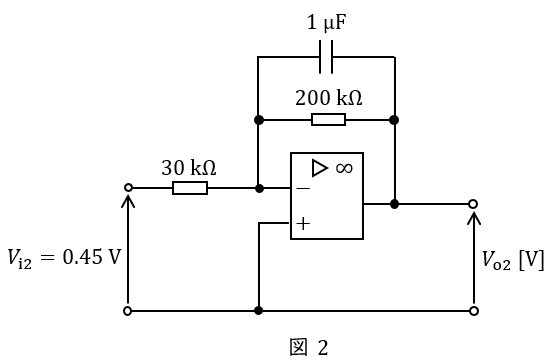
(b) 図1及び図2のような直流増幅回路がある。それぞれの出力電圧 \( V_{\mathrm{o1}} \),\( V_{\mathrm{o2}} \) の値 [V] の組合せとして,正しいものを次の (1) ~ (5) のうちから一つ選べ。
ただし,演算増幅器は理想的なものとし,\( V_{\mathrm{i1}} = 0.6 \) [V] 及び \( V_{\mathrm{i2}} = 0.45 \) [V] は直流の入力電圧である。
\[ \begin{array}{ccc} & V_{\mathrm{o1}} & V_{\mathrm{o2}} \\ \hline (1) & 6.6 & -3.0 \\ \hline (2) & 6.6 & 3.0 \\ \hline (3) & -6.6 & 3.0 \\ \hline (4) & -4.5 & 9.0 \\ \hline (5) & 4.5 & -9.0 \\ \hline \end{array} \]
合格への方程式
オペアンプの基本構造
演算増幅器(オペアンプ)とは
演算増幅器(Operational Amplifier、通称オペアンプ)は、アナログ集積回路(IC)の一種で、電子回路の基本的な構成要素として広く使用されています。
オペアンプの基本構造
- 反転入力端子(-):マイナス記号で表示
- 非反転入力端子(+):プラス記号で表示
- 出力端子:1つの出力
- 電源端子:正電源(+Vcc)と負電源(-Vee)
シンボル記号の理解
オペアンプは三角形の記号で表現され、左側に2つの入力端子、右側に1つの出力端子があります。この形は信号の流れを直感的に表しています。
覚え方のコツ
「オペアンプは2つの入力を比較して、その差を大きく増幅する装置」と覚えましょう。まるで2つの意見を聞いて、その違いを大声で伝える人のようなイメージです。
アナログICとしての特徴
オペアンプはアナログ信号(連続的に変化する信号)を扱う集積回路です。デジタル信号(0と1だけの信号)を扱うデジタルICとは異なります。
| 特徴 | アナログIC(オペアンプ) | デジタルIC |
|---|---|---|
| 信号の種類 | 連続的に変化する信号 | 0と1の離散信号 |
| 主な用途 | 増幅、フィルタ、演算 | 論理演算、記憶 |
| 電圧レベル | 任意の電圧値 | 決められた電圧レベル |
入力端子の役割
オペアンプの2つの入力端子にはそれぞれ異なる役割があります。
反転入力端子(-)
この端子に入力された信号は、出力で位相が反転(上下逆転)します。例えば、正の電圧を入力すると負の電圧が出力されます。
非反転入力端子(+)
この端子に入力された信号は、出力で位相が保持されます。正の電圧を入力すると正の電圧が出力されます。
差動増幅の原理
オペアンプは「差動増幅器」と呼ばれ、2つの入力端子間の電圧の差を増幅します。
\[ V_{\mathrm{out}} = A \times (V_+ - V_-) \]ここで、\( A \)は増幅度、\( V_+ \)は非反転入力電圧、\( V_- \)は反転入力電圧です。
注意点
オペアンプは入力端子間の電圧差のみを増幅します。両方の入力に同じ電圧がかかっている場合(同相信号)は理想的には増幅されません。これを「同相除去」と呼びます。
実際のオペアンプの種類
市販されているオペアンプには多くの種類があり、用途に応じて選択します。
- 汎用オペアンプ:741、LM358など
- 高速オペアンプ:高周波信号用
- 低ノイズオペアンプ:精密測定用
- 低消費電力オペアンプ:電池駆動機器用
理想的な特性と動作原理
理想的なオペアンプの3つの特性
実際のオペアンプを理解するために、まず理想的な特性を覚えましょう。この3つの特性は問題を解く際の重要なカギとなります。
理想的オペアンプの3大特性
- 電圧増幅率が無限大:\( A = \infty \)
- 入力インピーダンスが無限大:\( Z_{\mathrm{in}} = \infty \)
- 出力インピーダンスがゼロ:\( Z_{\mathrm{out}} = 0 \)
特性1:電圧増幅率が無限大
増幅率が無限大ということは、わずかな入力電圧差でも無限大の出力が生じることを意味します。しかし、実際の出力は電源電圧で制限されます。
バーチャルショートの概念
増幅率が無限大で、出力が有限の値を持つ場合、入力端子間の電圧差は0Vでなければなりません。これを「バーチャルショート」と呼びます。
\[ V_+ = V_- \quad \text{(バーチャルショート)} \]特性2:入力インピーダンスが無限大
入力インピーダンスが無限大ということは、入力端子には電流が流れないことを意味します。
水道の例え
入力インピーダンスを水道の蛇口に例えると、無限大のインピーダンスは「完全に閉じた蛇口」のようなものです。どんなに水圧(電圧)がかかっても、水(電流)は流れません。
特性3:出力インピーダンスがゼロ
出力インピーダンスがゼロということは、出力端子から任意の電流を取り出しても出力電圧が変化しないことを意味します。
理想的な電圧源
出力インピーダンスがゼロのオペアンプは、理想的な電圧源として動作します。負荷がどのように変化しても、出力電圧は一定に保たれます。
実際のオペアンプとの比較
実際のオペアンプは理想的な特性からわずかに外れますが、多くの場合、理想的な特性として扱って問題ありません。
| 特性 | 理想的な値 | 実際の値(例:741) |
|---|---|---|
| 電圧増幅率 | ∞ | 約100,000倍 |
| 入力インピーダンス | ∞ | 約2MΩ |
| 出力インピーダンス | 0Ω | 約75Ω |
動作原理の理解
オペアンプは常に2つの入力電圧を等しくしようとする性質があります。これが負帰還回路の基本原理です。
負帰還の動作
- 入力端子間に電圧差が生じる
- その差が増幅されて出力に現れる
- 出力の一部が入力に戻される(帰還)
- 入力端子間の電圧差が小さくなる
- 安定した状態に達する
自動制御の例え
オペアンプの負帰還動作は、エアコンの温度制御に似ています。設定温度と実際の温度の差を検知して、その差をなくすように動作します。
飽和とリニア領域
オペアンプには2つの動作領域があります。
- リニア領域:負帰還がかかっている状態で、増幅器として動作
- 飽和領域:出力が電源電圧に張り付いている状態
注意事項
オペアンプを増幅器として使用する場合は、必ず負帰還回路を構成する必要があります。負帰還がないと、わずかな入力でも出力が飽和してしまいます。
基本回路と増幅動作
非反転増幅回路
非反転増幅回路は、入力信号と同じ位相で増幅された信号を出力します。入力信号が正の場合、出力も正になります。
非反転増幅回路の特徴
- 入力信号は非反転入力端子(+)に接続
- 反転入力端子(-)は出力との間に帰還回路を形成
- 入力インピーダンスが非常に高い
- 増幅率は \( A_v = 1 + \frac{R_f}{R_1} \)
非反転増幅回路の動作解析
理想的なオペアンプの特性を使って動作を解析します。
解析手順
- バーチャルショートにより:\( V_+ = V_- \)
- 入力電流ゼロにより:入力端子に電流は流れない
- 抵抗分圧により:\( V_- = V_{\mathrm{out}} \times \frac{R_1}{R_1 + R_f} \)
- これらの条件から増幅率を導出
反転増幅回路
反転増幅回路は、入力信号と逆の位相で増幅された信号を出力します。入力信号が正の場合、出力は負になります。
反転増幅回路の特徴
- 入力信号は反転入力端子(-)に接続
- 非反転入力端子(+)は通常接地
- 入力インピーダンスは入力抵抗の値
- 増幅率は \( A_v = -\frac{R_f}{R_1} \)
反転増幅回路の動作解析
反転増幅回路も理想的なオペアンプの特性を使って解析できます。
仮想接地の概念
反転増幅回路では、非反転入力端子が接地されているため、バーチャルショートにより反転入力端子も0Vになります。これを「仮想接地」と呼びます。
電圧フォロワ(バッファ)
電圧フォロワは、入力電圧と同じ電圧を出力する回路です。増幅率は1ですが、インピーダンス変換の役割を果たします。
電圧フォロワの用途
- 高インピーダンス信号源から低インピーダンス負荷への信号伝送
- 信号の分岐(バッファリング)
- A/D変換器の入力回路
加算回路
複数の入力信号を加算して出力する回路です。反転増幅回路を応用して構成されます。
\[ V_{\mathrm{out}} = -R_f \left(\frac{V_1}{R_1} + \frac{V_2}{R_2} + \frac{V_3}{R_3}\right) \]減算回路
2つの入力信号の差を出力する回路です。差動増幅回路とも呼ばれます。
減算回路の応用
減算回路は、ノイズ除去やセンサー信号の処理に広く使用されます。特に、同相ノイズ(両方の入力に同じように混入するノイズ)を除去する効果があります。
積分回路と微分回路
オペアンプにコンデンサを組み合わせることで、積分や微分の演算を行うことができます。
| 回路 | 構成 | 出力 |
|---|---|---|
| 積分回路 | 帰還抵抗をコンデンサに置換 | 入力の積分 |
| 微分回路 | 入力抵抗をコンデンサに置換 | 入力の微分 |
実用上の注意
理想的な積分回路や微分回路は実用上問題がある場合があります。特に微分回路は高周波ノイズを増幅しやすいため、通常は抵抗を直列に加えて制限を設けます。
実用回路と応用例
アクティブフィルタ
オペアンプを使用したフィルタ回路は、パッシブフィルタ(抵抗、コンデンサ、インダクタのみ)と比べて多くの利点があります。
アクティブフィルタの利点
- インダクタが不要(小型化、低コスト)
- 増幅機能を併せ持つ
- 出力インピーダンスが低い
- 設計の自由度が高い
フィルタの種類と特性
| フィルタ種類 | 通過帯域 | 主な用途 |
|---|---|---|
| ローパスフィルタ | 低周波成分 | ノイズ除去、A/D変換前処理 |
| ハイパスフィルタ | 高周波成分 | DC成分除去、信号結合 |
| バンドパスフィルタ | 特定周波数帯域 | 通信機器、音響機器 |
| バンドストップフィルタ | 特定周波数以外 | 特定ノイズ除去 |
コンパレータ回路
コンパレータは2つの電圧を比較し、その大小関係をデジタル信号として出力します。
コンパレータの動作
- V+ > V- の場合:出力は正の飽和電圧(High)
- V+ < V- の場合:出力は負の飽和電圧(Low)
シュミットトリガ回路
シュミットトリガは、入力信号にノイズが含まれていても安定したデジタル出力を得ることができる回路です。
ヒステリシス特性
シュミットトリガは異なる2つの閾値を持ちます。上昇時と下降時で異なる閾値を使用することで、ノイズによる誤動作を防ぎます。
発振回路
オペアンプを使用して正弦波や矩形波を発生させる回路を構成できます。
主な発振回路
- ウィーンブリッジ発振器:正弦波発生
- フェーズシフト発振器:RC回路による位相シフト利用
- リラクゼーション発振器:矩形波、三角波発生
電源回路への応用
オペアンプは電源回路の制御にも広く使用されています。
- 定電圧回路:出力電圧を一定に保つ
- 定電流回路:出力電流を一定に保つ
- スイッチング電源制御:PWM制御信号生成
センサー信号処理
各種センサーからの微弱信号を処理するためにオペアンプが使用されます。
センサー信号処理の課題と解決法
| 課題 | 解決法 |
|---|---|
| 信号が微弱 | 高利得増幅回路 |
| ノイズが多い | 差動増幅、フィルタ |
| インピーダンスが高い | バッファ回路 |
| オフセットがある | 減算回路 |
アナログ計算機
オペアンプの名前の由来でもある演算機能を活用した応用です。
アナログ演算の種類
- 加算:複数信号の和を求める
- 減算:2つの信号の差を求める
- 積分:信号の積分値を求める
- 微分:信号の微分値を求める
- 対数・指数:非線形演算
現代の応用分野
現在でもオペアンプは多くの分野で重要な役割を果たしています。
- オーディオ機器:高品質な音響信号処理
- 測定器:精密な電圧・電流測定
- 医療機器:生体信号の増幅・処理
- 産業制御:センサー信号処理、制御信号生成
- 通信機器:信号の増幅・フィルタリング
デジタル時代におけるオペアンプ
デジタル技術が発達した現在でも、現実世界はアナログです。センサーからの信号をデジタル処理するためには、必ずアナログ回路が必要になります。そのため、オペアンプの重要性は変わりません。
選定と設計のポイント
オペアンプ選定の基準
- 周波数特性:必要な帯域幅を満たすか
- 精度:オフセット電圧、温度特性
- 電源電圧:単電源か両電源か
- 消費電力:電池駆動の場合は重要
- パッケージ:基板レイアウトに適合するか
実用設計での注意点
理想的な特性を前提とした設計に加えて、実際の回路では以下の点に注意が必要です:
- 電源のバイパスコンデンサ
- 発振防止対策
- 入力バイアス電流の補償
- 適切なグランドパターンの設計
🔍 ワンポイントアドバイス: オペアンプの問題を解く際は、まず「理想的な3つの特性」を思い出しましょう。特に「バーチャルショート」と「入力電流ゼロ」の2つの条件を使えば、ほとんどの回路解析ができます。また、実際の回路設計では理想特性からの偏差も考慮する必要があることを覚えておきましょう!
今日は演算増幅器(オペアンプ)の問題やな!これは電子回路の基本でもあるし、最近よく出題される分野やで。まず演算増幅器って何か知ってるか?
演算増幅器(オペアンプ)は、アナログICの一種で、入力された微小な電圧信号を大きく増幅する電子部品です。
主な特徴は:
・反転入力(-)と非反転入力(+)の2つの入力端子
・1つの出力端子
・非常に高い増幅度
・入力インピーダンスが非常に大きい
・出力インピーダンスが非常に小さい
そうや!よく知ってるな。理想的な演算増幅器には重要な特徴が3つあるんやで。まず1つ目は「電圧増幅率が無限大」っちゅうことや。これが何を意味するか分かるか?
電圧増幅率が無限大ということは、出力電圧が有限の値を持つ場合、入力端子間の電圧差は0Vでなければならないということですね。
これを「バーチャルショート」と呼びます。つまり:
\( V_+ = V_- \) (非反転入力電圧 = 反転入力電圧)
この概念は演算増幅器の解析で最も重要なポイントです。
完璧や!バーチャルショートは演算増幅器の解析で一番大事な概念やな。2つ目の特徴は「入力インピーダンスが無限大」っちゅうことや。これはどういう意味?
入力インピーダンスが無限大ということは、入力端子には電流が流れないということです。
つまり:
\( I_+ = I_- = 0 \) (入力端子への電流は0A)
これにより、演算増幅器は前段の回路に負荷を与えずに信号を取り出すことができます。
その通りや!3つ目の特徴は「出力インピーダンスがゼロ」っちゅうことや。これで理想的な演算増幅器の3つの特徴が揃ったな。ほんなら(a)問題を見てみよか。どの記述が間違ってると思う?
選択肢を一つずつ確認してみます:
(1) アナログICの一種 → 正しい
(2) 入力インピーダンスが小さくて出力インピーダンスが大きい → 間違い!
(3) 反転・非反転の2つの入力端子と1つの出力端子 → 正しい
(4) 入力端子間の電圧のみを増幅 → 正しい
(5) 増幅度が非常に大きい → 正しい
正解は(2)ですね。実際は入力インピーダンスが大きく、出力インピーダンスが小さいです。
正解や!(a)の答えは(2)やな。入力インピーダンスと出力インピーダンスが逆に書いてあるのが間違いや。ほんなら(b)問題に進もか。まず図1の回路を見てみよう。
これは非反転増幅回路やな。\( V_{i1} = 0.6 \, \mathrm{V} \) が非反転入力(+)に入ってるで。
図1は非反転増幅回路ですね。非反転入力(+)に \( V_{i1} = 0.6 \, \mathrm{V} \) が入力されています。
バーチャルショートにより:
\( V_+ = V_- = 0.6 \, \mathrm{V} \)
つまり、反転入力(-)の電位も 0.6V になります。
コンデンサは直流回路では開放として扱うので、無視して計算できます。
そうや!バーチャルショートで反転入力も0.6Vになるんやな。ほんなら \( R_{11} = 10 \, \mathrm{k\Omega} \) に流れる電流 \( I_1 \) を計算してみよか。オームの法則やで。
\( R_{11} = 10 \, \mathrm{k\Omega} \) に流れる電流を計算します:
\[ \begin{aligned} I_1 &= \frac{V_-}{R_{11}} \\[10pt] &= \frac{0.6}{10 \times 10^3} \\[10pt] &= \frac{0.6}{10000} \\[10pt] &= 6.0 \times 10^{-5} \, \mathrm{A} \end{aligned} \]60μAの電流が流れます。
ええ計算や!演算増幅器の入力端子には電流が流れへんから、\( R_{12} = 100 \, \mathrm{k\Omega} \) にも同じ電流 \( I_1 \) が流れるんやで。ほんなら出力電圧 \( V_{o1} \) を求めてみよか。
出力電圧 \( V_{o1} \) を計算します:
\[ \begin{aligned} V_{o1} &= V_- + R_{12} \times I_1 \\[10pt] &= 0.6 + (100 \times 10^3) \times (6.0 \times 10^{-5}) \\[10pt] &= 0.6 + 6.0 \\[10pt] &= 6.6 \, \mathrm{V} \end{aligned} \]図1の出力電圧は 6.6V になります。
完璧や!\( V_{o1} = 6.6 \, \mathrm{V} \) やな。ほんなら図2の回路を見てみよか。
これは反転増幅回路やな。非反転入力(+)は接地されてるから0Vや。
図2は反転増幅回路ですね。非反転入力(+)が接地されているので:
\( V_+ = 0 \, \mathrm{V} \)
バーチャルショートにより:
\( V_- = V_+ = 0 \, \mathrm{V} \)
反転入力(-)の電位も 0V になります。これを「仮想接地」と呼びます。
そうや!仮想接地っちゅう概念も大事やな。ほんなら \( R_{21} = 30 \, \mathrm{k\Omega} \) に流れる電流 \( I_2 \) を計算してみよか。入力電圧は \( V_{i2} = 0.45 \, \mathrm{V} \) やで。
\( R_{21} = 30 \, \mathrm{k\Omega} \) に流れる電流を計算します:
\[ \begin{aligned} I_2 &= \frac{V_{i2} - V_-}{R_{21}} \\[10pt] &= \frac{0.45 - 0}{30 \times 10^3} \\[10pt] &= \frac{0.45}{30000} \\[10pt] &= 1.5 \times 10^{-5} \, \mathrm{A} \end{aligned} \]15μAの電流が流れます。
ええ計算や!演算増幅器の入力端子には電流が流れへんから、\( R_{22} = 200 \, \mathrm{k\Omega} \) にも同じ電流 \( I_2 \) が流れるんやで。ほんなら出力電圧 \( V_{o2} \) を求めてみよか。ただし、電流の向きに注意せなあかんで。
出力電圧 \( V_{o2} \) を計算します。電流の向きに注意して:
\[ \begin{aligned} V_{o2} &= V_- - R_{22} \times I_2 \\[10pt] &= 0 - (200 \times 10^3) \times (1.5 \times 10^{-5}) \\[10pt] &= 0 - 3.0 \\[10pt] &= -3.0 \, \mathrm{V} \end{aligned} \]図2の出力電圧は -3.0V になります。
完璧や!\( V_{o2} = -3.0 \, \mathrm{V} \) やな。マイナスになるのが反転増幅回路の特徴や。ほんなら答えを確認してみよか。\( V_{o1} = 6.6 \, \mathrm{V} \)、\( V_{o2} = -3.0 \, \mathrm{V} \) やから、選択肢のどれが正しい?
計算結果をまとめると:
\( V_{o1} = 6.6 \, \mathrm{V} \)(非反転増幅回路)
\( V_{o2} = -3.0 \, \mathrm{V} \)(反転増幅回路)
選択肢を確認すると:
(1) \( V_{o1} = 6.6 \, \mathrm{V} \)、\( V_{o2} = -3.0 \, \mathrm{V} \) ← これが正解
したがって、(b)の答えは (1) です。
正解や!(b)の答えは(1)やな。ところで、なんで非反転増幅回路の出力が正の値で、反転増幅回路の出力が負の値になったか分かるか?
これは回路の動作原理によるものです:
非反転増幅回路(図1):
入力信号が非反転入力(+)に入るため、出力は入力と同じ極性(正)になります。
反転増幅回路(図2):
入力信号が反転入力(-)に入るため、出力は入力と逆の極性(負)になります。
これが「非反転」と「反転」の名前の由来です。
そうや!回路の名前通りの動作をしてるんやな。演算増幅器の増幅率はどうやって決まるか分かるか?抵抗の比率が重要やで。
演算増幅器の増幅率は帰還抵抗によって決まります:
非反転増幅回路:
増幅率 = \( 1 + \frac{R_{12}}{R_{11}} = 1 + \frac{100}{10} = 11 \)
確認:\( 0.6 \times 11 = 6.6 \, \mathrm{V} \) ✓
反転増幅回路:
増幅率 = \( -\frac{R_{22}}{R_{21}} = -\frac{200}{30} = -6.67 \)
確認:\( 0.45 \times (-6.67) = -3.0 \, \mathrm{V} \) ✓
すばらしい!増幅率の公式もちゃんと理解してるな。演算増幅器のコンデンサが回路にあったけど、直流解析では無視したやろ?これはなんでや?
コンデンサの特性により、直流回路では無視できます:
直流(定常状態):
コンデンサは開放(無限大のインピーダンス)として扱います。これは直流に対してコンデンサが電流を通さないためです。
交流:
コンデンサは周波数に応じたインピーダンス \( Z = \frac{1}{j\omega C} \) を持ちます。
今回は直流入力なので、コンデンサは開放として扱い、計算から除外できるわけです。
完璧や!直流と交流でのコンデンサの扱いの違いも理解してるな。最後に今回の問題のポイントをまとめてみよか。
今回の重要ポイントをまとめます:
1. 理想的な演算増幅器の特徴
・電圧増幅率:無限大(バーチャルショート)
・入力インピーダンス:無限大(入力電流ゼロ)
・出力インピーダンス:ゼロ
2. 非反転増幅回路
・増幅率:\( 1 + \frac{R_f}{R_i} \)(正の値)
・入力と出力の極性が同じ
3. 反転増幅回路
・増幅率:\( -\frac{R_f}{R_i} \)(負の値)
・入力と出力の極性が逆
4. 直流解析でのコンデンサ
・開放として扱う(無視可能)
完璧やな!演算増幅器は電子回路の基本中の基本やから、しっかり理解しといてな。実際の回路でも増幅器、フィルタ、発振器など幅広く使われてるで。今回の2つの基本回路(非反転・反転)は絶対に覚えとき!
ありがとうございました!演算増幅器の基本特性と増幅回路の動作原理がよく理解できました。
実用面での豆知識:
演算増幅器は1960年代に集積回路として実用化され、現在では数十円から購入できる汎用部品です。音響機器、測定器、制御回路など、あらゆる電子機器に使用されています。
覚え方のコツ:
・バーチャルショート:「+と-の電位は同じ」
・入力電流ゼロ:「入力端子は電流を飲み込まない」
・非反転 vs 反転:「+入力は同極性、-入力は逆極性」
計算のポイント:
演算増幅器の問題は、理想的な特性を前提とした定型的な計算が多いので、基本パターンを覚えれば確実に得点できます。
解説まとめ
問題回路図
■ 演算増幅器(オペアンプ)とは
演算増幅器(オペアンプ)は、アナログ信号処理の基本素子として広く使用されるアナログICです。非常に高い増幅度、高入力インピーダンス、低出力インピーダンスを持ち、負帰還回路と組み合わせることで安定した増幅特性を実現できます。電力系統の計測・制御回路、保護継電器、監視装置など、電気主任技術者が関わる多くの機器で使用されています。
■ 計算手順と公式
理想的な演算増幅器の特徴
理想的な演算増幅器は以下の特性を持ちます。
1. 電圧増幅率が無限大
2. 入力インピーダンスが無限大(入力電流=0)
3. 出力インピーダンスがゼロ
4. バーチャルショート:V₊ = V₋
非反転増幅回路
非反転入力端子に信号を入力し、反転入力端子を分圧回路で帰還する構成です。
増幅度:\( A_v = 1 + \frac{R_f}{R_i} \)
出力電圧:\( V_o = V_i \times A_v \)
反転増幅回路
反転入力端子に信号を入力し、非反転入力端子を接地する構成です。
増幅度:\( A_v = -\frac{R_f}{R_i} \)
出力電圧:\( V_o = -V_i \times \frac{R_f}{R_i} \)
バーチャルショートの原理
負帰還により入力端子間の電位差が零になります。
V₊ = V₋(バーチャルショート条件)
■ 具体的な計算例
問題条件
理想的な演算増幅器を使用、Vi1 = 0.6V、Vi2 = 0.45V、定常状態(コンデンサは開放扱い)
(a) 演算増幅器の特徴に関する問題
各選択肢を検討します:
(1) アナログICの一種である → 正しい
演算増幅器は代表的なアナログICです。
(2) 入力インピーダンスが小さくて出力インピーダンスが大きい → 誤り
実際は入力インピーダンスが非常に大きく、出力インピーダンスが非常に小さいです。
(3) 反転並びに非反転の二つの入力端子と一つの出力端子がある → 正しい
-(反転)と+(非反転)の入力端子と出力端子を持ちます。
(4) 入力端子間の電圧のみを増幅して出力する → 正しい
差動増幅器として動作します。
(5) 増幅度が非常に大きい → 正しい
理想的には無限大の増幅度を持ちます。
(b) 図1(非反転増幅回路)の解析
回路定数の確認
図1の回路において、R₁₁ = 10kΩ、R₁₂ = 100kΩ、Vi1 = 0.6V
Step 1: 非反転入力端子の電位
\[ \begin{aligned} V_+ &= V_{i1} = 0.6 \ \mathrm{V} \end{aligned} \]Step 2: バーチャルショート条件の適用
\[ \begin{aligned} V_- &= V_+ = 0.6 \ \mathrm{V} \end{aligned} \]Step 3: R₁₁を流れる電流の計算
\[ \begin{aligned} I_1 &= \frac{V_-}{R_{11}} \\[5pt] &= \frac{0.6}{10 \times 10^3} \\[5pt] &= 6.0 \times 10^{-5} \ \mathrm{A} \end{aligned} \]Step 4: 出力電圧の計算
入力端子に電流が流れないため、R₁₂にも同じ電流が流れます:
\[ \begin{aligned} V_{o1} &= V_- + R_{12} \times I_1 \\[5pt] &= 0.6 + (100 \times 10^3) \times (6.0 \times 10^{-5}) \\[5pt] &= 0.6 + 6.0 \\[5pt] &= 6.6 \ \mathrm{V} \end{aligned} \](c) 図2(反転増幅回路)の解析
回路定数の確認
図2の回路において、R₂₁ = 30kΩ、R₂₂ = 200kΩ、Vi2 = 0.45V
Step 1: 非反転入力端子の電位
\[ \begin{aligned} V_+ &= 0 \ \mathrm{V} \text{(接地)} \end{aligned} \]Step 2: バーチャルショート条件の適用
\[ \begin{aligned} V_- &= V_+ = 0 \ \mathrm{V} \end{aligned} \]Step 3: R₂₁を流れる電流の計算
\[ \begin{aligned} I_2 &= \frac{V_{i2} - V_-}{R_{21}} \\[5pt] &= \frac{0.45 - 0}{30 \times 10^3} \\[5pt] &= 1.5 \times 10^{-5} \ \mathrm{A} \end{aligned} \]Step 4: 出力電圧の計算
入力端子に電流が流れないため、R₂₂にも同じ電流が流れます(逆方向):
\[ \begin{aligned} V_{o2} &= V_- - R_{22} \times I_2 \\[5pt] &= 0 - (200 \times 10^3) \times (1.5 \times 10^{-5}) \\[5pt] &= 0 - 3.0 \\[5pt] &= -3.0 \ \mathrm{V} \end{aligned} \]演算増幅器解析のポイント
1. バーチャルショート条件(V₊ = V₋)を適用する
2. 入力端子には電流が流れない(無限大の入力インピーダンス)
3. 帰還抵抗と入力抵抗に同じ電流が流れる
4. 反転増幅回路では出力が反転する
計算結果まとめ
| 回路 | 構成 | 入力電圧 | 出力電圧 |
|---|---|---|---|
| 図1 | 非反転増幅 | 0.6 V | 6.6 V |
| 図2 | 反転増幅 | 0.45 V | -3.0 V |
結論:
(a) 演算増幅器の特徴で誤っているもの 答え:(2)
(b) 出力電圧の組み合わせ Vo1 = 6.6V、Vo2 = -3.0V 答え:(1)
■ 実務上の留意点
演算増幅器は、電力系統の計測・制御・保護装置において重要な役割を果たします。高精度な信号処理と安定した動作特性により、様々な用途に活用されています。
計測回路への応用:電流・電圧変換器からの微小信号を増幅し、制御装置で処理可能なレベルに変換します。高精度な測定のため、温度ドリフトや雑音特性の優れた演算増幅器を選定する必要があります。保護継電器への応用:事故検出回路において、電流・電圧の異常値を検出し、保護動作を行います。高速応答と高い信頼性が要求されるため、産業用グレードの演算増幅器が使用されます。制御回路への応用:PID制御器の実現において、比例・積分・微分演算を行います。制御性能に直結するため、オフセット電圧や温度特性の管理が重要です。
電源回路設計:演算増幅器の動作には安定した電源が必要です。リップル除去フィルタや電圧レギュレータとの組み合わせにより、高精度な動作を確保します。EMC対策:高周波雑音に対する耐性を向上させるため、適切な配線設計とシールド対策が必要です。特に開閉サージや雷サージに対する保護回路の設置が重要です。冗長化設計:重要な保護・制御回路では、演算増幅器の故障に備えた冗長化設計を検討します。故障検出機能と自動切替機能により、システムの信頼性を向上させます。定期点検:長期間使用される設備では、演算増幅器の特性劣化を定期的に点検し、必要に応じて交換することで、システムの性能維持を図ります。