【第三種電気主任技術者試験】同期機(電動機・発電機)の完全解説 - 構造から特性・制御まで
2. 同期機の基本構造

同期機の構造はシンプルです。外側で静止している「固定子(ステータ)」と、内側で回転する「回転子(ロータ)」——この2つだけ。しかし、この単純な構造の中に、電験三種で問われるポイントが凝縮されています。誘導機との違いを意識しながら、各部の役割を理解していきましょう。
2.1 固定子(ステータ)の構造
固定子は同期機の外側にある静止部分です。「固定」の名の通り、動きません。構成要素は次の3つです。
- 固定子鉄心:珪素鋼板を何枚も重ねた円筒形の構造物。内側には「スロット」と呼ばれる溝があり、ここに巻線を収めます
- 固定子巻線:スロットに配置された三相巻線。分布巻・短節巻が一般的で、高調波を抑える工夫がされています
- 固定子フレーム:鉄心を支え、機械全体を保護する外枠です

ここで重要なのが、発電機と電動機での役割の違いです。同期発電機では、固定子は「電機子」と呼ばれ、ここで電力が生み出されます。一方、同期電動機では、固定子に交流電源をつないで回転磁界を作り出します。同じ部品でも、役割が逆転するわけです。
なぜ珪素鋼板を「積層」するのか?
固定子鉄心に珪素鋼板を使う理由は2つあります。まず、珪素(シリコン)を添加することで電気抵抗が高くなり、渦電流損が減少します。次に、薄い鋼板を絶縁して積み重ねる(積層する)ことで、渦電流の流れる経路を分断し、さらに損失を抑えます。これは変圧器の鉄心と同じ考え方。電験では「鉄損=ヒステリシス損+渦電流損」という公式とセットで覚えておきましょう。
固定子巻線の接続——なぜY結線が多いのか?
大型の同期発電機では、固定子巻線にY(スター)結線が採用されるのが一般的です。理由は2つ。まず、線間電圧が相電圧の√3倍になるため、同じ線間電圧を得るのに各相の絶縁が楽になります。次に、第3次高調波電流(零相電流)が回路を循環しないため、波形がきれいになります。小型機ではΔ(デルタ)結線も使われますが、試験では「大型機=Y結線」と覚えておきましょう。
分布巻と短節巻——高調波対策の基本
固定子巻線には「分布巻」と「短節巻」という巻き方が採用されています。集中巻(1つのスロットに全巻線を集める方式)だと、誘導起電力の波形が矩形に近くなり、高調波成分が多くなってしまいます。分布巻は巻線を複数のスロットに分散させ、短節巻はコイルピッチを磁極ピッチより短くすることで、波形を正弦波に近づけます。この効果を数値化したものが「巻線係数 \(K_w\)」で、分布係数\(K_d\)と短節係数\(K_p\)の積で表されます。
2.2 回転子(ロータ)の構造
回転子は同期機の心臓部。内側で回転し、磁界を作り出すパーツです。
- 回転子鉄心:鋼鉄製の磁性体。形状によって「突極形」と「円筒形」に分かれます(詳しくは次節で解説)
- 界磁巻線:回転子鉄心に巻かれたコイル。ここに直流電流を流すと、回転子全体が電磁石になります
- ダンパ巻線:回転子表面に埋め込まれた導体棒。始動時や負荷急変時の安定性向上に貢献します
- スリップリング:回転している回転子に、外部から直流電流を送り込むための装置です
同期機の名前の由来を思い出してください。「同期」とは、回転子の磁界が固定子の回転磁界とぴったり同じ速度で回ること。界磁巻線で作られた電磁石が、固定子の回転磁界に引っ張られて同期回転する——これが同期機の基本原理です。
ダンパ巻線の3つの役割
ダンパ巻線(制動巻線)は、回転子の磁極面に埋め込まれた銅やアルミの導体棒で、両端が短絡環でつながっています。構造は誘導電動機のかご形回転子とそっくり。役割は主に3つあります。
- 始動補助:同期電動機は自力で始動できないため、ダンパ巻線を使って誘導電動機として始動させます
- 乱調防止:負荷変動で回転速度が揺らぐとダンパ巻線に誘導電流が流れ、振動を抑える制動トルクが発生します
- 不平衡電流対策:逆相電流による逆回転磁界の影響を軽減します
誘導機との構造比較——試験で問われるポイント
同期機と誘導機の最大の違いは「回転子の構造」です。同期機は回転子に界磁巻線を持ち、直流励磁で電磁石を作ります。一方、誘導機の回転子(かご形・巻線形)には外部から電流を供給せず、電磁誘導で電流が流れます。この違いが「同期速度で回るか、すべりが生じるか」という動作の違いにつながります。
2.3 突極形と円筒形回転子
回転子の形状は、同期機の用途を決定づける重要な要素です。電験三種では頻出なので、違いをしっかり押さえましょう。
| 項目 | 突極形回転子 | 円筒形回転子 |
|---|---|---|
| 形状 | 磁極が突き出た形(凸凹がある) | 表面が滑らかな円筒状 |
| 適用 | 低速〜中速機(水力発電機、ディーゼル発電機) | 高速機(火力・原子力のタービン発電機) |
| 極数 | 多い(4極以上が一般的) | 少ない(2極または4極) |
| 回転速度 | 50〜600 min-1程度 | 3000 min-1(50Hz)/ 3600 min-1(60Hz) |
| 特徴 | リラクタンストルクが発生 | 磁気回路がほぼ均一 |
| 機械的強度 | 遠心力に弱い(高速回転不可) | 高い(高速回転に耐える) |
| 回転子の直径と長さ | 直径が大きく、軸方向に短い | 直径が小さく、軸方向に長い |
覚え方:「水は突く、火は丸い」
水力発電機は「突極形」、火力発電機は「円筒形(丸い)」。なぜこうなるかというと、すべては回転速度で決まります。火力発電所のタービンは毎分3000回転(50Hz地域)もの高速で回るため、遠心力に耐えられる頑丈な円筒形が必須。一方、水力発電機は水車と直結するため、せいぜい数百回転の低速運転。遠心力の心配がないので、構造がシンプルな突極形でOKというわけです。
極数と回転速度の関係を理解する
同期速度の公式 \(n_s = \frac{120f}{p}\) を思い出してください。周波数が一定(50Hzまたは60Hz)なら、極数が多いほど回転速度は低くなります。水力発電機は低速運転なので極数を増やす必要があり、その結果、円周上に多くの磁極を配置する突極形が採用されます。逆に、火力発電機は高速運転なので極数は最小限(2極か4極)でよく、高速回転に耐える円筒形が選ばれます。
突極形には「リラクタンストルク」という特有の現象があります。磁極の出っ張りがあるため、回転子の向きによって磁気抵抗(リラクタンス)が変わり、追加のトルクが発生するのです。円筒形では表面が均一なため、この現象は起きません。電験の計算問題では、突極機と円筒機で式が異なることがあるので注意してください。
リラクタンストルクとは?
突極機では、磁束は磁気抵抗(リラクタンス)の小さい経路を通ろうとします。磁極の中心(直軸方向)は鉄心があるため磁気抵抗が小さく、磁極間(横軸方向)は空気なので磁気抵抗が大きくなります。この非対称性により、回転子は磁気抵抗が最小になる位置に引き寄せられる力を受けます。これがリラクタンストルクで、界磁電流がゼロでも発生するのが特徴です。突極機の出力にはこのリラクタンストルク分が加わるため、同じ条件なら円筒機より大きな出力が得られます。
2.4 界磁系統と励磁方式
回転子を電磁石にするには、界磁巻線に直流電流を流す必要があります。この直流電流の供給方法を「励磁方式」と呼びます。
- 他励方式:外部の独立した直流電源(別の発電機やバッテリーなど)から界磁電流を供給
- 自励方式:自分自身の出力の一部を整流器で直流に変換し、界磁電流として使用
- ブラシレス励磁方式:主軸に小型の交流発電機(励磁機)と回転整流器を搭載。スリップリングとブラシが不要になる
- 静止励磁方式:半導体整流器(サイリスタなど)で交流を直流に変換して供給
各励磁方式の特徴比較
- 他励方式:始動時から安定した励磁が可能。ただし、外部電源が必要で設備が複雑になる
- 自励方式:外部電源不要でシンプル。ただし、始動時は残留磁気に頼るため、電圧確立に時間がかかる場合がある
- ブラシレス励磁方式:ブラシの摩耗・火花がなく保守が容易。大型機の主流。応答速度はやや遅い
- 静止励磁方式:サイリスタで高速制御が可能。応答性に優れ、系統安定化に有利
励磁電流で何が変わる?
励磁電流の制御は、同期機の運転において極めて重要です。同期発電機では、励磁電流を増減することで出力電圧と無効電力を調整できます。同期電動機では、励磁電流によって力率を制御可能——過励磁なら進み力率、不足励磁なら遅れ力率になります。現代の発電所では、AVR(自動電圧調整器)がこの制御を自動で行っています。
現代の大型発電機では、ブラシレス励磁方式が主流です。従来のスリップリングとブラシを使う方式は、ブラシの摩耗や火花の発生といった保守上の問題がありました。ブラシレス方式なら、これらの心配から解放され、メンテナンスの手間が大幅に減ります。
AVR(自動電圧調整器)の役割
AVR(Automatic Voltage Regulator)は、発電機の端子電圧を一定に保つための制御装置です。負荷が変動すると電圧も変動しようとしますが、AVRが励磁電流を自動調整することで電圧を維持します。さらに、系統の安定度向上のためにPSS(電力系統安定化装置)と組み合わせて使用されることもあります。電験では「AVR=励磁制御=電圧・無効電力の調整」という関係を押さえておきましょう。
2.5 冷却方式
大型の同期機は数百MW〜数千MWもの電力を扱うため、銅損や鉄損による発熱が膨大になります。この熱を効率よく除去しないと、巻線の絶縁が劣化し、最悪の場合は焼損に至ります。そこで、さまざまな冷却方式が採用されています。
- 空気冷却:ファンで空気を循環させる方式。小型〜中型機に採用。構造がシンプルで保守が容易
- 水素冷却:水素ガスを冷却媒体として使用。空気の約14倍の熱伝導率と約1/10の密度を持ち、冷却効率が高く風損も少ない。大型タービン発電機の主流
- 水冷却:固定子巻線の内部に冷却水を通す方式。最も冷却効率が高く、超大型機に採用
なぜ水素冷却が優れているのか?
水素は空気に比べて熱伝導率が高く、密度が低いという特性があります。熱伝導率が高いと熱を効率よく運び去ることができ、密度が低いと回転子が空気をかき回す際の損失(風損)が減少します。また、水素は不活性なので、巻線の絶縁材料を酸化させません。ただし、水素は可燃性ガスなので、空気との混合比が爆発範囲(4〜75%)に入らないよう、密封と監視が必要です。
冷却方式と容量の関係
一般的な目安として、空気冷却は数十MW程度まで、水素冷却は数百MW級、水素冷却+水冷却の組み合わせは1000MWを超える超大型機に採用されます。電験では「大型タービン発電機=水素冷却」と覚えておけば、多くの問題に対応できます。
同期機の基本構造——試験で押さえるべきポイント
- 同期機は「固定子(外側・静止)」と「回転子(内側・回転)」の2部構成
- 固定子鉄心は珪素鋼板の積層構造で、渦電流損を低減
- 固定子巻線は分布巻・短節巻で高調波を抑制し、大型機ではY結線が一般的
- 回転子の界磁巻線に直流を流すと電磁石になり、固定子の回転磁界と同期して回転
- ダンパ巻線は始動補助・乱調防止・不平衡電流対策の3つの役割を持つ
- 突極形は低速機(水力)、円筒形は高速機(火力・原子力)に使用
- 突極形では直軸と横軸でリアクタンスが異なり、リラクタンストルクが発生
- 励磁方式には他励・自励・ブラシレス・静止励磁があり、現代はブラシレスが主流
- 励磁電流の制御(AVR)で、電圧・無効電力・力率を調整できる
- 大型タービン発電機の冷却には水素冷却が広く採用されている
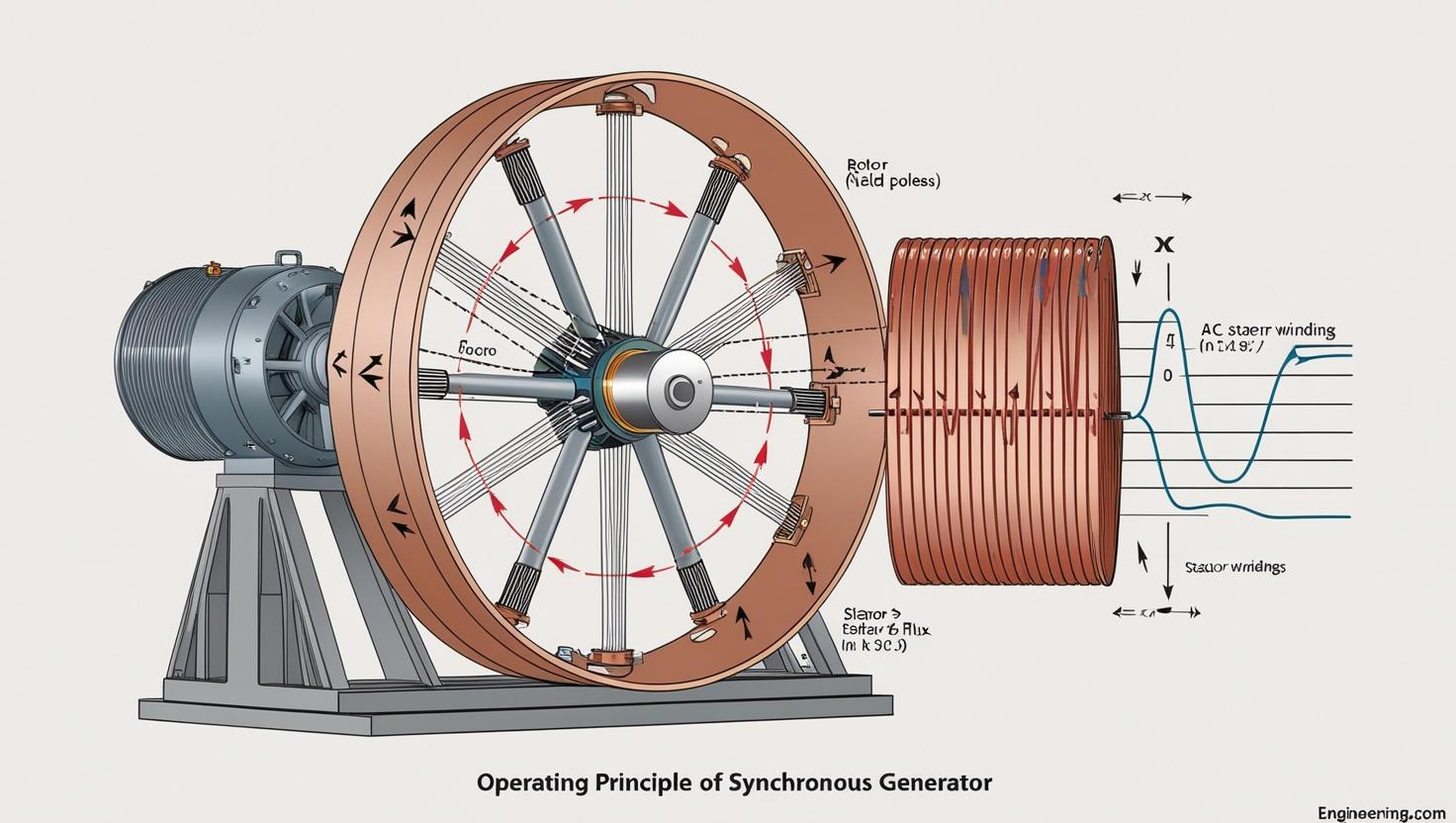
3. 同期機の動作原理
同期機の「同期」とは何か?それは、回転子が固定子の作る回転磁界とぴったり同じ速度で回ること。このシンプルな原理が、発電所から工場まで、あらゆる場所で電気エネルギーと機械エネルギーの変換を支えています。このセクションでは、同期機の動作を支える物理現象を深掘りしていきましょう。
3.1 回転磁界と同期速度
まず、回転磁界の発生原理を押さえましょう。固定子には三相巻線が空間的に120°ずつずらして配置されています。ここに、時間的に120°の位相差を持つ三相交流を流すと、各巻線が作る磁界が合成され、一定速度で回転する磁界——「回転磁界」が生まれます。

なぜ回転磁界が生まれるのか?
三相交流の各相は、時間的に120°ずつ位相がずれています。U相が最大のとき、V相とW相は負の値。この瞬間、U相の巻線が作る磁界が最も強くなります。時間が進むとV相が最大になり、磁界の中心がV相巻線の方向に移動します。さらに時間が進むとW相が最大に——。このように、各相の磁界が順番に強くなることで、合成磁界があたかも回転しているように見えるのです。空間的な120°配置と時間的な120°位相差が組み合わさって、滑らかな回転磁界が実現します。
この回転磁界の速度を「同期速度」と呼び、電源周波数と極数だけで決まります。
各記号の意味:
- \(n_s\):同期速度 [min-1]
- \(f\):電源周波数 [Hz]
- \(p\):極数
この公式の導出を理解する
なぜ「120」という係数が出てくるのでしょうか?2極機の場合、電源が1サイクル(1/f 秒)で磁界は1回転します。つまり、1秒間にf回転、1分間なら60f回転です。4極機では、電源1サイクルで磁界は1/2回転しかしません(極のペアが2組あるため)。一般に、p極機では1サイクルで2/p回転するので、1分間の回転数は 60f × (2/p) = 120f/p となります。
同期速度の計算例
4極の同期機を50Hzで運転する場合:
電験三種では、以下の値は暗記必須です。
- 2極:3000 min-1(50Hz)/ 3600 min-1(60Hz)
- 4極:1500 min-1(50Hz)/ 1800 min-1(60Hz)
- 6極:1000 min-1(50Hz)/ 1200 min-1(60Hz)
- 8極:750 min-1(50Hz)/ 900 min-1(60Hz)
同期機の回転子は、この回転磁界に「引っ張られて」同じ速度で回ります。ただし、完全に一致しているわけではなく、わずかな角度差(これを「負荷角」または「出力角」と呼ぶ)を保ちながら追従しています。この角度差こそが、エネルギー変換の源なのです。
負荷角のイメージ
負荷角を理解するには、「磁石同士の引き合い」をイメージするとよいでしょう。回転磁界のN極と回転子のS極が引き合って回転しますが、負荷がかかると回転子は少し遅れます。この「遅れ角」が負荷角δです。発電機では回転子が回転磁界より進み、電動機では遅れます。負荷が大きいほど角度差は大きくなり、出力も増加しますが、90°を超えると引き合う力より離れる力が勝ってしまい、脱調に至ります。
3.2 同期発電機の原理
同期発電機の仕事は「機械エネルギー → 電気エネルギー」の変換です。タービンなどの原動機で回転子を回すと、界磁極が作る磁界が固定子巻線を横切り、電磁誘導によって交流起電力が発生します。
フレミングの右手の法則を確認
発電機の動作原理は「電磁誘導」です。導体が磁界中を移動すると起電力が発生する——ファラデーの法則ですね。同期発電機では、回転子の磁界が固定子巻線を横切ることで起電力が誘導されます。起電力の方向はフレミングの右手の法則で決まります。親指が導体の運動方向、人差し指が磁界の方向、中指が起電力の方向です。
誘導起電力の大きさは、変圧器と同じ形の式で表されます。
各記号の意味:
- \(E\):誘導起電力(実効値)[V]
- \(f\):周波数 [Hz]
- \(N\):1相あたりの直列巻数
- \(\Phi\):1極あたりの磁束 [Wb]
- \(K_w\):巻線係数(= 分布係数 \(K_d\) × 短節係数 \(K_p\))
4.44という係数の正体
この「4.44」はどこから来るのでしょうか?実は \(4.44 \approx 2\pi / \sqrt{2} \times (2/\pi) \times \sqrt{2} = 4\sqrt{2}/\sqrt{2} \times 1/\sqrt{2} \times \sqrt{2}\)... いや、もっと簡単に説明しましょう。正弦波交流の場合、磁束の時間変化率の最大値は \(2\pi f \Phi\) です。これを実効値に換算し、さらに波形率(正弦波なら \(\pi/(2\sqrt{2})\))を考慮すると、係数は \(2\pi \times \frac{1}{\sqrt{2}} \times \frac{2}{\pi} = \frac{4}{\sqrt{2}} = 2\sqrt{2} \approx 2.83\)... ではなく、1周期で磁束が+Φから-Φまで2Φ変化することを考えると \(4 \times 1.11 = 4.44\) となります。試験では「4.44」を覚えておけば十分です。
発電機が出力する交流の周波数は、回転速度と極数で決まります。
各記号の意味:
- \(f\):出力周波数 [Hz]
- \(p\):極数
- \(n\):回転速度 [min-1]
周波数維持の重要性
電力系統の周波数は厳密に管理されています(日本では50Hzまたは60Hz)。周波数が変動すると、工場の生産設備や家庭の時計など、あらゆる機器に影響が出ます。発電機の周波数は回転速度で決まるため、タービンの出力を調整して回転速度を一定に保つ必要があります。これを「ガバナ制御」と呼び、需要と供給のバランスを保つ重要な役割を担っています。
無負荷飽和曲線を理解する
無負荷状態で界磁電流を増やしていくと、端子電圧はどう変化するでしょうか?最初はほぼ比例して上昇しますが、やがて上昇率が鈍くなります。これは鉄心の磁気飽和によるもの。この特性を示したグラフが「無負荷飽和曲線」です。試験では、この曲線を使って短絡比を求める問題が出題されます。
短絡比とは?
短絡比 \(K_s\) は、同期機の特性を表す重要な指標です。定義は「定格電圧を発生させる界磁電流」と「定格電流を流す三相短絡時の界磁電流」の比です。式で書くと:
短絡比が大きいほど同期リアクタンスが小さく、電圧変動率が小さい(安定した電圧が得られる)という特徴があります。一般に、突極機(水力発電機)は短絡比が大きく(0.8〜1.2)、円筒機(火力発電機)は小さい(0.4〜0.8)傾向があります。
3.3 同期電動機の原理
同期電動機は発電機の逆、「電気エネルギー → 機械エネルギー」の変換を行います。固定子に三相交流を供給して回転磁界を作り、この回転磁界が回転子の界磁極を引っ張ることでトルクが発生します。
フレミングの左手の法則を確認
電動機の動作原理は「電磁力」です。磁界中の導体に電流を流すと力が発生する——これがモータの基本原理ですね。力の方向はフレミングの左手の法則で決まります。人差し指が磁界の方向、中指が電流の方向、親指が力の方向です。発電機が右手、電動機が左手と覚えましょう。
円筒機の場合、発生トルクは次の式で表されます。
各記号の意味:
- \(T\):発生トルク [N·m]
- \(V_1\):相電圧 [V]
- \(E_f\):界磁による誘導起電力(内部誘導起電力)[V]
- \(X_s\):同期リアクタンス [Ω]
- \(\omega_s\):同期角速度 [rad/s]
- \(\delta\):負荷角(出力角)[rad]
出力の式も覚えよう
トルクと角速度の積が出力(機械的動力)です。円筒機の出力は次の式で表されます:
電圧を線間電圧 \(V\)(= \(\sqrt{3}V_1\))で表すと:
\[P = \frac{V E_f}{X_s}\sin\delta \quad \text{(1相分、三相なら3倍)}\]この式から、出力を増やすには「電圧を上げる」「励磁を強める(\(E_f\)を大きくする)」「同期リアクタンスを小さくする」「負荷角を大きくする(ただし90°まで)」という方法があることがわかります。
この式の核心は「\(\sin\delta\)」の部分です。負荷角δが大きくなるほどトルクは増加し、δ=90°で最大値に達します。しかし、90°を超えるとトルクは減少に転じ、やがて回転磁界についていけなくなる——これが「脱調(同期はずれ)」です。脱調すると電動機は停止してしまうため、安定運転には負荷角を90°以内に保つ必要があります。
突極機のトルク式
突極機では、リラクタンストルクが加わるため、トルク式が複雑になります:
第1項が円筒機と同じ「電磁トルク」、第2項が「リラクタンストルク」です。リラクタンストルクは \(\sin 2\delta\) に比例するため、δ=45°で最大となります。また、界磁電流がゼロ(\(E_f = 0\))でも発生するのが特徴です。電験では、このリラクタンストルクの存在と特徴を問う問題が出題されることがあります。
同期電動機の4つの特徴
誘導電動機との違いを意識しながら覚えましょう。
- 定速度運転:負荷が変わっても回転速度は同期速度で一定(誘導機はすべりで速度低下)
- 力率調整が可能:界磁電流を変えることで、進み・遅れ・力率1.0を自在にコントロール
- 自己始動できない:停止状態から回転磁界についていけないため、始動装置(ダンパ巻線など)が必要
- 脱調の危険:過負荷で負荷角が90°を超えると同期はずれを起こす
同期電動機の始動方法
同期電動機は停止状態から自力で始動できません。回転磁界は瞬時に同期速度で回り始めますが、慣性を持つ回転子はついていけないからです。そこで、以下の始動方法が用いられます:
- 自己始動法:ダンパ巻線を利用して誘導電動機として始動し、同期速度付近で界磁電流を投入して同期引き入れを行う
- 始動電動機法:別の小型電動機で同期速度まで加速してから、電源に接続する
- 低周波始動法:インバータで電源周波数を低くして始動し、徐々に周波数を上げる
現在最も一般的なのは自己始動法です。
3.4 等価回路とフェーザ図
同期機の電気的な振る舞いを理解するには、等価回路とフェーザ図が欠かせません。簡略化した等価回路では、同期機は「誘導起電力\(E_f\)」「同期リアクタンス\(X_s\)」「電機子抵抗\(R_a\)」の直列回路で表されます。
同期リアクタンスの正体
同期リアクタンス \(X_s\) は、実際には2つの成分の和です:
- \(X_a\):電機子反作用リアクタンス(電機子電流が作る磁界の影響)
- \(X_l\):漏れリアクタンス(主磁束に寄与しない漏れ磁束の影響)
電機子反作用とは、電機子(固定子)に電流が流れることで新たな磁界が発生し、界磁の磁界に影響を与える現象です。この影響をリアクタンスとして等価的に表現したものが電機子反作用リアクタンスです。
電圧方程式は、発電機と電動機で符号が異なります。
- 発電機:\(\dot{E}_f = \dot{V}_t + jX_s \dot{I}_a + R_a \dot{I}_a\)(起電力が電流を送り出す)
- 電動機:\(\dot{V}_t = \dot{E}_f + jX_s \dot{I}_a + R_a \dot{I}_a\)(電源電圧が起電力に打ち勝つ)
各記号の意味:
- \(\dot{E}_f\):界磁による誘導起電力(内部誘導起電力)
- \(\dot{V}_t\):端子電圧
- \(X_s\):同期リアクタンス
- \(\dot{I}_a\):電機子電流
- \(R_a\):電機子抵抗(大型機では無視できるほど小さい)
なぜ電機子抵抗を無視できるのか?
大型の同期機では、電機子巻線の抵抗 \(R_a\) は同期リアクタンス \(X_s\) に比べて非常に小さくなります(1/10以下)。これは、大型機では巻線の断面積が大きく抵抗が小さい一方、磁気回路が大きいためリアクタンスが大きくなるからです。そのため、計算問題では \(R_a \approx 0\) として簡略化することが多く、電圧方程式は:
- 発電機:\(\dot{E}_f = \dot{V}_t + jX_s \dot{I}_a\)
- 電動機:\(\dot{V}_t = \dot{E}_f + jX_s \dot{I}_a\)
となります。ただし、小型機や効率計算では \(R_a\) を考慮する必要があります。
フェーザ図は、これらの電圧・電流の関係をベクトルで表現したものです。負荷条件や励磁状態によって図の形が変わるため、問題を解く際は「今どの状態か」を意識してフェーザ図を描くことが重要です。
フェーザ図の描き方——発電機の場合
発電機のフェーザ図を描く手順は次の通りです:
- 端子電圧 \(\dot{V}_t\) を基準(水平方向)に置く
- 電機子電流 \(\dot{I}_a\) を力率角θだけずらして描く(遅れ力率なら \(\dot{V}_t\) より遅れ方向)
- \(\dot{V}_t\) に \(jX_s \dot{I}_a\)(電流より90°進み)を加える
- \(R_a \dot{I}_a\)(電流と同相)を加える(無視する場合は省略)
- 合成したベクトルが \(\dot{E}_f\) となる
\(\dot{V}_t\) と \(\dot{E}_f\) のなす角が負荷角δです。発電機では \(\dot{E}_f\) が \(\dot{V}_t\) より進んでいます。
突極機の2つのリアクタンス
円筒機では同期リアクタンス\(X_s\)は一定ですが、突極機では話が違います。磁極の出っ張りがあるため、磁束の通りやすさが方向によって異なるのです。磁極の中心を通る方向(直軸)のリアクタンスを\(X_d\)、磁極間を通る方向(横軸)のリアクタンスを\(X_q\)と呼び、一般に\(X_d > X_q\)となります。この非対称性がリラクタンストルクを生み出します。
電機子反作用の3つのパターン
電機子電流が界磁磁束に与える影響(電機子反作用)は、力率によって異なります:
- 力率1(純抵抗負荷):交差磁化作用。磁界を歪ませるが、全体の強さは変わらない
- 遅れ力率(誘導性負荷):減磁作用。界磁磁束を弱める方向に作用し、端子電圧が低下
- 進み力率(容量性負荷):増磁作用。界磁磁束を強める方向に作用し、端子電圧が上昇
この関係は、発電機の電圧変動率や電動機のV曲線を理解する上で重要です。
3.5 出力と安定度
同期機の出力特性と安定運転の条件について、さらに詳しく見ていきましょう。
同期発電機の出力
\[P = \frac{V_t E_f}{X_s}\sin\delta \quad \text{(1相分)}\] \[P = \frac{3V_t E_f}{X_s}\sin\delta \quad \text{(三相合計)}\]各記号の意味:
- \(P\):有効電力出力 [W]
- \(V_t\):端子電圧(相電圧)[V]
- \(E_f\):内部誘導起電力(相電圧)[V]
- \(X_s\):同期リアクタンス [Ω]
- \(\delta\):負荷角 [rad]
定態安定度と過渡安定度
同期機の安定度には2種類あります:
- 定態安定度:負荷がゆっくり変化するときの安定性。負荷角δが90°以内なら、\(dP/d\delta > 0\) となり、負荷変動に対して自己復元力(同期化力)が働きます
- 過渡安定度:急激な外乱(短絡事故など)が発生したときの安定性。等面積法などを用いて解析します
電験三種では主に定態安定度が出題されますが、「負荷角90°が安定限界」という概念は必ず覚えておきましょう。
同期化力(同期化トルク)とは?
同期機が安定に運転できるのは「同期化力」のおかげです。負荷角δがわずかに増加すると、出力が増加して回転子を引き戻そうとする力が働きます。この復元力を同期化力といい、次の式で表されます:
δ=0°で同期化力は最大、δ=90°で零になります。δが90°を超えると同期化力は負になり、角度がさらに開く方向に力が働く——これが脱調です。
電圧変動率
発電機の端子電圧は、負荷によって変動します。この変動の程度を示すのが電圧変動率εです:
- \(V_0\):無負荷時の端子電圧
- \(V_n\):定格負荷時の端子電圧
遅れ力率負荷では電機子反作用(減磁作用)により電圧が低下するため電圧変動率は正の値、進み力率負荷では電圧が上昇するため負の値になることもあります。
同期機の動作原理——試験で押さえるべきポイント
- 回転磁界は、空間的120°配置の三相巻線に時間的120°位相差の電流を流すことで発生
- 同期速度は\(n_s = \frac{120f}{p}\)で計算(2極・50Hzなら3000 min-1)
- 発電機:原動機で回転子を回す → 固定子に誘導起電力が発生(フレミング右手)
- 電動機:固定子の回転磁界が回転子を引っ張る → トルク発生(フレミング左手)
- 誘導起電力\(E = 4.44fN\Phi K_w\)は変圧器と同じ形
- 出力・トルクは\(\sin\delta\)に比例し、負荷角δ=90°で最大(安定限界)
- 突極機はリラクタンストルク(\(\sin 2\delta\)に比例)が加わる
- 等価回路では、誘導起電力\(E_f\)と同期リアクタンス\(X_s\)で表現
- 同期リアクタンス\(X_s\) = 電機子反作用リアクタンス + 漏れリアクタンス
- 突極機は\(X_d\)(直軸)と\(X_q\)(横軸)の2つのリアクタンスを持ち、\(X_d > X_q\)
- 電機子反作用:遅れ力率で減磁、進み力率で増磁
- 同期化力\(P_s = \frac{V_t E_f}{X_s}\cos\delta\)が安定運転の鍵
- 短絡比\(K_s\)は同期リアクタンスの逆数に等しい(p.u.値で)
4. 同期機の特性
同期機の動作原理を学んだところで、次は具体的な特性を見ていきましょう。このセクションで扱う「無負荷飽和曲線」「短絡特性」「V曲線」は、電験三種で繰り返し出題される重要テーマです。特にV曲線は、同期電動機の力率制御という実用的な話題に直結するため、しっかり理解しておく必要があります。
4.1 同期発電機の特性
同期発電機の性能を表す特性曲線には、主に次の4つがあります。それぞれが何を意味し、どう使うのかを押さえましょう。
- 無負荷飽和曲線(磁化特性):界磁電流と無負荷時の端子電圧の関係
- 三相短絡特性:界磁電流と三相短絡時の電機子電流の関係
- 外部特性:負荷電流と端子電圧の関係(力率ごとに異なる)
- 負荷飽和曲線:負荷時の界磁電流と端子電圧の関係
無負荷飽和曲線を詳しく理解する
無負荷飽和曲線は、発電機を無負荷で運転し、界磁電流 \(I_f\) を変化させたときの端子電圧 \(E_0\) をプロットしたものです。界磁電流が小さい領域では、電圧はほぼ比例して上昇します(直線部分)。これは鉄心が磁気飽和していない領域です。界磁電流を増やしていくと、鉄心が磁気飽和し始め、電圧の上昇率が鈍くなります(飽和部分)。この曲線の直線部分を延長した線を「空隙線(エアギャップ線)」と呼びます。空隙線と実際の曲線の差が、鉄心の磁気飽和の影響を表しています。
三相短絡特性はなぜ直線なのか?
三相短絡特性は、発電機の端子を三相短絡し、界磁電流 \(I_f\) を変化させたときの短絡電流 \(I_s\) をプロットしたものです。この特性が直線になるのは、短絡時には端子電圧がほぼゼロになり、鉄心を通る磁束が非常に小さくなるためです。磁束が小さいと鉄心は飽和せず、磁束と電流が比例関係を保ちます。また、短絡電流は同期インピーダンス(主に同期リアクタンス)によって制限されるため、\(I_s \approx E_0 / X_s\) の関係が成り立ちます。
短絡比の定義と求め方
\[K_s = \frac{I_{f0}}{I_{fs}}\]各記号の意味:
- \(K_s\):短絡比
- \(I_{f0}\):無負荷で定格電圧を発生させる界磁電流
- \(I_{fs}\):三相短絡時に定格電流を流す界磁電流
短絡比と同期リアクタンス(p.u.値)の関係:
\[K_s = \frac{1}{X_s \, \text{(p.u.)}}\]短絡比の計算例
ある同期発電機において、無負荷で定格電圧6600Vを発生させるのに必要な界磁電流が50A、三相短絡時に定格電流500Aを流すのに必要な界磁電流が40Aであった。短絡比を求めよ。
短絡比1.25ということは、同期リアクタンス(p.u.)は \(1/1.25 = 0.8\) p.u.となります。
短絡比が大きいとどうなる?
短絡比の大小によって、発電機の特性が異なります:
- 短絡比が大きい(\(K_s\) > 1):同期リアクタンスが小さい → 電圧変動率が小さい → 安定度が高い → ただし界磁巻線が大きくなり、機械が大型化・高コスト化
- 短絡比が小さい(\(K_s\) < 1):同期リアクタンスが大きい → 電圧変動率が大きい → 安定度が低い → 機械は小型化・低コスト化できる
一般的に、水力発電機(突極機)は短絡比が大きく(0.8〜1.2)、火力発電機(円筒機)は小さい(0.4〜0.8)傾向があります。現代の発電機ではAVRによる電圧制御が可能なため、短絡比を小さくして機械を小型化する傾向にあります。
電圧変動率の定義
\[\varepsilon = \frac{E_0 - V_n}{V_n} \times 100 \, [\%]\]各記号の意味:
- \(\varepsilon\):電圧変動率 [%]
- \(E_0\):無負荷時の端子電圧(定格負荷時と同じ界磁電流・同じ回転速度で)
- \(V_n\):定格負荷時の端子電圧
負荷力率と電圧変動の関係
発電機の端子電圧は、負荷の力率によって大きく変化します。これは電機子反作用の影響です:
- 遅れ力率負荷(誘導性):減磁作用により界磁磁束が弱まる → 端子電圧が低下 → 電圧変動率は正の大きな値
- 力率1.0の負荷(抵抗性):交差磁化作用のみ → 電圧変動は比較的小さい → 電圧変動率は小さな正の値
- 進み力率負荷(容量性):増磁作用により界磁磁束が強まる → 端子電圧が上昇 → 電圧変動率は負の値になることも
電験の問題では、力率の違いによる電圧変動の傾向を問われることが多いので、この関係をしっかり覚えておきましょう。
外部特性曲線の読み方
外部特性曲線は、界磁電流と回転速度を一定に保ったまま、負荷電流を変化させたときの端子電圧の変化を示します。横軸に負荷電流(または負荷)、縦軸に端子電圧をとり、力率ごとに異なる曲線が描かれます。無負荷時の電圧を100%とすると:
- 遅れ力率0.8:定格負荷で約80〜90%に低下
- 力率1.0:定格負荷で約95%程度
- 進み力率0.8:定格負荷で100%を超えることもある
実際の発電所ではAVRで電圧を一定に制御しますが、この特性を理解していないと、AVRの動作原理も理解できません。
実際の発電所では、AVR(自動電圧調整器)により端子電圧を一定に保つ運転が行われています。しかし、これらの基本特性を理解することは、発電機の設計や系統運用を考える上で不可欠です。
4.2 同期電動機の特性
同期電動機の特性は、発電機とは異なる視点で整理されています。特に重要なのは、負荷角特性とV曲線です。
- 負荷角特性(出力特性):負荷角δとトルク(または出力)の関係
- V曲線:界磁電流と電機子電流の関係(力率制御の基礎)
- 始動特性:始動時のトルクと電流の特性
- 速度-トルク特性:同期速度で一定(垂直線)
同期電動機の速度-トルク特性
誘導電動機の速度-トルク特性は曲線を描きますが、同期電動機は同期速度で垂直の直線になります。これは、負荷が変わっても回転速度が同期速度で一定であることを意味します。ただし、トルクには上限(最大トルク)があり、これを超えると脱調して停止します。この特性は「定速度特性」と呼ばれ、製紙工場のロール駆動など、複数の電動機を同じ速度で運転したい用途に適しています。
円筒形同期電動機のトルク
\[T = \frac{3V_1 E_f}{X_s \omega_s}\sin\delta = T_{max}\sin\delta\]突極形同期電動機のトルク
\[T = \frac{3V_1 E_f}{X_d \omega_s}\sin\delta + \frac{3V_1^2(X_d - X_q)}{2X_d X_q \omega_s}\sin 2\delta\]各項の意味:
- 第1項:電磁トルク(円筒機と同じ形)
- 第2項:リラクタンストルク(突極機特有)
突極機と円筒機のトルク特性の違い
円筒機のトルクは \(\sin\delta\) に比例するため、負荷角90°で最大となります。一方、突極機ではリラクタンストルク(\(\sin 2\delta\) に比例、45°で最大)が加わるため:
- 最大トルクを発生する負荷角は90°より小さくなる(70〜80°程度)
- 同じ界磁電流でも、円筒機より大きなトルクが得られる
- 界磁電流がゼロでも、リラクタンストルクだけで回転できる(リラクタンスモータの原理)
電験では、突極機と円筒機のトルク式の違いや、リラクタンストルクの特徴を問う問題が出題されます。
脱調(同期はずれ)のメカニズム
同期電動機が脱調するまでの過程を理解しましょう:
- 負荷が増加すると、負荷角δが大きくなる
- δが増加するとトルクも増加し、負荷とバランスする
- さらに負荷が増えて、δが最大トルク点(円筒機で90°)を超える
- δが増えてもトルクは減少に転じ、負荷に負けて回転子がさらに遅れる
- 一度90°を超えると復帰できず、回転子は回転磁界から離れて停止(脱調)
このため、実用上は最大トルクの60〜70%程度の負荷で運転し、安全余裕を確保します。
同期電動機の始動方法(詳細)
同期電動機は自己始動能力がないため、以下の方法で始動します:
- 自己始動法(ダンパ始動法):最も一般的。ダンパ巻線を利用して誘導電動機として始動。同期速度付近(すべり5%以下)で界磁電流を投入し、同期引き入れを行う
- 始動電動機法:別の小型電動機(誘導電動機など)で同期速度まで加速してから、電源に同期投入する
- 低周波始動法:インバータで電源周波数を低く(数Hz)して始動し、徐々に周波数を上げる。可変速運転にも対応
- 減電圧始動法:始動時に電圧を下げて始動電流を抑制。リアクトル始動、始動補償器始動など
4.3 V曲線と力率制御
V曲線は、同期電動機の最も重要な特性の一つです。負荷を一定に保ったまま界磁電流を変化させると、電機子電流がV字型に変化することから、この名前がつきました。この特性を理解することで、同期電動機による力率制御の仕組みがわかります。
V曲線の形成原理
なぜV字型になるのでしょうか?同期電動機の有効電力(機械出力)は、端子電圧と電機子電流の積の実数成分で決まります。負荷一定ということは、有効電力が一定ということです:
界磁電流を変えると力率 \(\cos\phi\) が変化します。有効電力を一定に保つには、力率が下がると電機子電流 \(I_a\) を増やす必要があります。力率1.0のとき(最適励磁)電機子電流は最小となり、力率が1.0から離れる(遅れでも進みでも)と電機子電流は増加します。これがV字型の原因です。
V曲線の3つの領域
V曲線は、界磁電流の大きさによって3つの領域に分けられます:
- 不足励磁領域(界磁電流小):誘導起電力 \(E_f\) が端子電圧 \(V_t\) より小さい。電動機は遅れ力率で運転し、系統から無効電力(遅れ)を吸収。誘導電動機と同様の振る舞い
- 正常励磁点(V曲線の底):力率1.0で運転。電機子電流が最小。無効電力の授受なし
- 過励磁領域(界磁電流大):誘導起電力 \(E_f\) が端子電圧 \(V_t\) より大きい。電動機は進み力率で運転し、系統に無効電力(進み)を供給。同期調相機と同様の振る舞い
負荷によるV曲線の変化
V曲線は負荷の大きさによって形が変わります:
- 負荷が大きいほど、V字の底(最小電機子電流)は高くなる
- 負荷が大きいほど、力率1.0を達成するのに必要な界磁電流(最適励磁電流)も大きくなる
- 無負荷のV曲線は最も下に位置し、ほぼ水平に近い形になる
試験では、複数の負荷条件でのV曲線が描かれ、力率や電流を読み取る問題が出題されることがあります。
力率改善への応用——同期調相機
工場では誘導電動機が多用されるため、全体として遅れ力率になりがちです。力率が悪いと、電力会社からペナルティ料金を課されたり、電圧降下が大きくなったりします。そこで、同期電動機を過励磁運転して進み力率とし、工場全体の力率を改善します。
さらに、機械的負荷を接続せずに無負荷で運転する同期機を「同期調相機」と呼びます。同期調相機は純粋に無効電力の調整のみを行い、過励磁で進み無効電力を供給(遅れ力率改善)、不足励磁で遅れ無効電力を吸収(進み力率改善)できます。近年は静止形無効電力補償装置(SVC)やSTATCOMに置き換わりつつありますが、原理を理解することは重要です。
無効電力の計算
同期電動機が供給(または吸収)する無効電力は次の式で計算できます:
各記号の意味:
- \(Q\):無効電力 [var](進み力率で正、遅れ力率で負とする場合もある)
- \(S\):皮相電力 [VA]
- \(P\):有効電力 [W]
- \(\phi\):力率角
V曲線を使った計算例
定格出力1000kW、定格電圧6600V(線間)の三相同期電動機がある。力率0.8(進み)で運転しているとき、電機子電流と無効電力を求めよ。
【解答】
\begin{align*} \text{皮相電力} \quad S &= \frac{P}{\cos\phi} = \frac{1000}{0.8} = 1250 \, \text{kVA} \\ \text{電機子電流} \quad I_a &= \frac{S}{\sqrt{3} V} = \frac{1250 \times 10^3}{\sqrt{3} \times 6600} \approx 109 \, \text{A} \\ \text{無効電力} \quad Q &= S \sin\phi = 1250 \times 0.6 = 750 \, \text{kvar(進み)} \end{align*}この電動機は系統に750kvarの進み無効電力を供給しています。
4.4 同期安定度
同期安定度とは、同期機が外乱に対して同期状態を維持できる能力のことです。発電機が系統に接続されている場合、負荷変動や事故などの外乱によって負荷角が変化しますが、適切な同期化力が働けば元の状態に戻ります。この能力が同期安定度です。
定態安定度と過渡安定度
同期安定度は、外乱の大きさによって2種類に分けられます:
- 定態安定度:小さな外乱(通常の負荷変動など)に対する安定性。同期化力係数 \(dP/d\delta\) が正であれば安定
- 過渡安定度:大きな外乱(短絡事故、発電機の脱落など)に対する安定性。等面積法などで解析
電験三種では主に定態安定度が出題されますが、過渡安定度の概念も知っておきましょう。
同期化力(同期化係数)
\[P_s = \frac{dP}{d\delta} = \frac{V_t E_f}{X_s}\cos\delta\]安定条件:
- \(P_s > 0\)(δ < 90°)のとき安定
- \(P_s = 0\)(δ = 90°)で安定限界
- \(P_s < 0\)(δ > 90°)のとき不安定(脱調)
同期化力の物理的意味
同期化力は「負荷角のずれを元に戻そうとする力」です。負荷角がわずかに増加したとき、出力も増加するならば(\(dP/d\delta > 0\))、加速トルクが減って回転子は減速し、負荷角は元に戻ります。逆に、負荷角が90°を超えると \(dP/d\delta < 0\) となり、負荷角が増えると出力が減るため、さらに負荷角が開いて脱調に至ります。
δ=90°は安定と不安定の境界で、理論上の「定態安定極限」と呼ばれます。実際の運転では、安全余裕を見て最大トルクの60〜70%程度で運転します。
等面積法(過渡安定度の解析)
過渡安定度の解析には「等面積法」が用いられます。これは、事故発生から除去までに回転子が得た加速エネルギー(面積A1)と、事故除去後に減速によって失うエネルギー(面積A2)を比較し、A1 ≤ A2 なら安定、A1 > A2 なら脱調と判定する方法です。
この方法から、事故除去が早いほど(高速遮断)、また最大出力が大きいほど(同期リアクタンスが小さいほど)安定度が向上することがわかります。
安定度向上対策のまとめ
同期機の安定度を向上させる方法は、大きく3つのカテゴリに分けられます:
1. 事故の影響を小さくする
- 高速度遮断器による事故除去時間の短縮
- 高速再閉路装置の採用
- 送電線の多重化(事故時の送電能力確保)
2. 送電能力を大きくする
- 送電線リアクタンスの低減(直列コンデンサの設置)
- 送電電圧の高圧化
- 中間開閉所の設置
3. 発電機の特性を改善する
- 高速励磁制御(AVR)の採用
- 電力系統安定化装置(PSS)の設置
- ダンパ巻線の適切な設計
- 発電機の慣性を大きくする(GD²の増大)
慣性定数と安定度
発電機の慣性(回転体の持つ運動エネルギー)は、安定度に大きく影響します。慣性定数Hは次のように定義されます:
ここで、Jは慣性モーメント、\(\omega_s\)は同期角速度、\(S_n\)は定格容量です。Hが大きいほど、外乱に対する負荷角の変化が緩やかになり、安定度が向上します。水車発電機は大きな水車と直結するため慣性定数が大きく(2〜4秒)、タービン発電機はやや小さい(3〜6秒)傾向があります。
4.5 同期発電機の並行運転
電力系統では、複数の発電機が並列に接続されて運転しています。この並行運転(並列運転)を安定に行うためには、いくつかの条件を満たす必要があります。
並行運転の条件(同期化の条件)
発電機を系統に接続する(同期投入する)際には、次の4つの条件を満たす必要があります:
- 電圧の大きさが等しい:発電機の端子電圧と系統電圧が一致
- 周波数が等しい:発電機の出力周波数と系統周波数が一致
- 位相が等しい:発電機の電圧位相と系統電圧位相が一致
- 相回転方向が等しい:三相の相順(R-S-T)が一致
これらの条件が満たされないと、投入時に大きな突入電流が流れ、発電機や系統に損傷を与える可能性があります。
同期検定器(シンクロスコープ)
並行運転の条件を確認するために、同期検定器(シンクロスコープ)が使用されます。これは、発電機電圧と系統電圧の位相差を表示する装置で、針が12時の位置で停止したとき(位相差ゼロ)が投入のタイミングです。針の回転速度は周波数差を表し、回転が止まっていれば周波数が一致しています。現代の発電所では自動同期投入装置(ASS)が広く使われています。
並行運転中の負荷分担
並行運転中の発電機間の負荷分担は、次のように制御されます:
- 有効電力の分担:原動機(タービン)の出力を調整。ガバナの速度垂下特性により、周波数が下がると出力が増加する方向に自動調整される
- 無効電力の分担:励磁電流を調整。AVRにより、電圧が下がると励磁を増やして無効電力を供給する方向に自動調整される
有効電力と無効電力を独立に制御できることが、同期発電機の大きな特徴です。
横流と循環電流
並行運転中の発電機間で、起電力の大きさや位相に差があると、発電機間に「横流」または「循環電流」と呼ばれる電流が流れます:
- 起電力の大きさに差がある場合:無効循環電流が流れる。起電力が大きい方から小さい方へ無効電力が流れる
- 起電力の位相に差がある場合:有効横流が流れる。位相が進んでいる方が有効電力を多く負担する
適切な循環電流は負荷分担の自動調整に役立ちますが、過大になると発電機の過熱や系統の不安定化を招きます。
同期機の特性——試験で押さえるべきポイント
- 無負荷飽和曲線は鉄心の磁気飽和を反映し、短絡特性は直線になる
- 短絡比 \(K_s = I_{f0}/I_{fs} = 1/X_s\)(p.u.)で、大きいほど安定だが機械が大型化
- 電圧変動率は力率によって異なり、遅れ力率で正(電圧低下)、進み力率で負(電圧上昇)
- 同期電動機は定速度運転が可能で、負荷が増えても同期速度を維持(脱調しない限り)
- 突極機はリラクタンストルクにより、円筒機より大きなトルクが得られる
- V曲線は界磁電流と電機子電流の関係を示し、力率1.0で電機子電流最小
- 過励磁で進み力率、不足励磁で遅れ力率となり、力率改善に利用可能
- 同期化力 \(P_s = (V_t E_f / X_s)\cos\delta\) が正のとき安定(δ < 90°)
- 並行運転には電圧・周波数・位相・相回転の4条件が必要
- 有効電力は原動機出力(ガバナ)、無効電力は励磁(AVR)で制御
5. 同期機の応用と制御
ここまで同期機の原理と特性を学んできました。このセクションでは、実際の現場でどのように使われているかを見ていきましょう。発電所での同期発電機の役割、工場での同期電動機の活用、そして運転に必要な制御技術について解説します。電験三種では、これらの実務的な知識も問われます。
5.1 電力系統における発電応用
私たちが使う電気のほとんどは、同期発電機で作られています。発電方式によって、使われる同期機の構造が異なります。
| 発電方式 | 原動機 | 回転子形状 | 極数 | 回転速度(50Hz) |
|---|---|---|---|---|
| 火力発電 | 蒸気タービン | 円筒形 | 2極 | 3000 min-1 |
| 原子力発電 | 蒸気タービン | 円筒形 | 4極 | 1500 min-1 |
| 水力発電 | 水車 | 突極形 | 多極(8〜96極) | 62.5〜750 min-1 |
| ガスタービン発電 | ガスタービン | 円筒形 | 2極 | 3000 min-1 |
| ディーゼル発電 | ディーゼルエンジン | 突極形 | 多極(4〜24極) | 250〜1500 min-1 |
| 風力発電 | 風車 | 突極形/永久磁石 | 多極 | 可変速(インバータ経由) |
なぜ原子力は4極なのか?
火力発電は2極(3000 min-1)が主流ですが、原子力発電では4極(1500 min-1)が多く採用されています。これは、原子力発電所で使用される蒸気の温度・圧力が火力発電より低いため、タービンの効率を上げるために長い翼を使う必要があり、遠心力の関係から回転速度を下げているのです。回転速度を半分にするために、極数を2倍(4極)にしています。
発電機容量の推移
発電技術の進歩により、1台あたりの発電機容量は大型化してきました。現在の大型火力発電所では、1台で100万kW(1000MW)級の発電機が稼働しています。原子力発電所ではさらに大きく、1台で120万kW級のものもあります。水力発電機は立地条件による制約がありますが、揚水発電所では50万kW級の大型機が使用されています。
電力系統では、同期発電機は「電気を作る」だけでなく、系統全体の安定性を支える役割も担っています。
同期発電機の4つの制御
発電所では、以下の4つの制御が行われています:
- 周波数制御(ガバナ制御):原動機の出力を調整。需要と供給のバランスを維持し、系統周波数を一定に保つ
- 電圧制御(AVR制御):励磁電流を調整。端子電圧を一定に保ち、無効電力の供給量を調整する
- 有効電力制御:原動機への入力(燃料、蒸気など)を調整。負荷追従や経済負荷配分を行う
- 無効電力制御:励磁電流を調整。系統電圧の維持と安定化に寄与する
有効電力は「原動機側」、無効電力は「励磁側」で制御するという関係を覚えておきましょう。
ガバナ制御とドループ特性
ガバナ(調速機)は、原動機の回転速度を検出し、設定値との差に応じて燃料や蒸気の量を調整します。複数の発電機が並列運転している場合、各発電機の負荷分担を適切に行うために「ドループ特性(速度垂下特性)」が設定されます。
ドループ率は通常3〜5%に設定され、系統周波数が低下すると各発電機の出力が自動的に増加する仕組みになっています。例えば、ドループ率4%の発電機では、周波数が4%(50Hzなら2Hz)低下すると出力が定格の100%増加します。
AVR(自動電圧調整器)の詳細
AVRは同期発電機の端子電圧を自動制御するシステムです。基本的な動作は:
- 端子電圧を検出し、基準値と比較
- 偏差に応じて励磁電流の指令値を計算
- 励磁装置(励磁機やサイリスタ整流器)を制御
- 界磁電流が変化し、端子電圧が調整される
現代のAVRは、単純な電圧制御だけでなく、以下の機能も備えています:
- 無効電力制御(Q制御)モード
- 力率制御モード
- PSS(電力系統安定化装置)機能
- V/Hz制限(過励磁保護)
- 低励磁制限(脱調防止)
PSS(電力系統安定化装置)とは?
PSSは、AVRに付加される安定化機能です。系統動揺(発電機間の出力振動)が発生すると、通常のAVRだけでは振動を抑制できないことがあります。PSSは、発電機の回転速度や有効電力の変動を検出し、励磁を変動させることで振動を減衰させます。現代の大型発電所ではPSSの設置が標準となっており、系統全体の安定度向上に貢献しています。
同期発電機は電力系統の「慣性」を提供する役割も果たしています。発電機の回転体(タービン、回転子)に蓄えられた運動エネルギーは、瞬時的な需給アンバランスを吸収するバッファとして機能します。近年、太陽光や風力など慣性を持たない電源が増加しているため、系統の慣性低下が新たな課題となっています。
5.2 同期電動機の産業応用
同期電動機は、誘導電動機と比べて構造が複雑で高価ですが、特定の用途では大きな利点があります。
同期電動機を選ぶ理由
誘導電動機ではなく同期電動機を選定する主な理由は以下の通りです:
- 力率改善:過励磁運転で進み力率となり、工場全体の力率を改善できる
- 定速度運転:負荷変動に関係なく同期速度で運転。複数軸の同期運転が必要な用途に最適
- 高効率:大型機では誘導電動機より効率が高い(すべり損失がない)
- 低速大トルク:多極構成で低速・大トルクが得られ、減速機が不要になる場合がある
| 応用分野 | 用途例 | 選定理由 |
|---|---|---|
| 鉱山・製鉄 | ホイスト、圧延機、送風機 | 大容量、高効率、力率改善 |
| セメント工場 | ボールミル、キルン駆動 | 低速大トルク、定速度運転 |
| 製紙工場 | 抄紙機のロール駆動 | 複数軸の同期運転、定速度 |
| 化学プラント | コンプレッサ、ポンプ | 高効率、連続運転、力率改善 |
| 電力系統 | 同期調相機 | 無効電力制御、電圧安定化 |
| 船舶 | 推進用電動機 | 高効率、可変速運転(インバータ併用) |
同期調相機の詳細
同期調相機は、機械的負荷を接続せずに運転する同期機で、無効電力の調整専用に使用されます。
- 過励磁運転:進み電流を系統に供給 → 遅れ力率の改善、電圧上昇
- 不足励磁運転:遅れ電流を系統から吸収 → 進み力率の改善、電圧低下
設置場所は、長距離送電線の末端、大都市近郊の変電所、大型工場などです。容量は数万kvar〜数十万kvarのものがあります。近年はSVC(静止形無効電力補償装置)やSTATCOMに置き換わりつつありますが、同期調相機は慣性を持つため系統安定化にも寄与できる利点があります。
永久磁石同期電動機(PMSM)の台頭
近年、界磁に永久磁石を使用した永久磁石同期電動機(PMSM)が急速に普及しています。PMSMの特徴は:
- 界磁巻線が不要で、構造がシンプル・軽量
- 励磁損失がないため、高効率
- インバータと組み合わせて可変速運転
- 電気自動車、エアコン、工作機械などで広く採用
ただし、永久磁石(レアアース)のコストや減磁リスクという課題もあります。電験三種では、従来の巻線界磁形同期機が中心ですが、PMSMの存在と特徴は知っておきましょう。
同期電動機と誘導電動機の使い分け
一般的な目安として:
- 小容量(〜数百kW):誘導電動機が主流。構造が簡単で安価、保守も容易
- 中容量(数百kW〜数MW):用途に応じて選択。力率改善が必要なら同期電動機
- 大容量(数MW以上):同期電動機が有利。効率の差が大きく、電気代で元が取れる
また、始動頻度が高い用途では、始動装置の手間を考慮して誘導電動機が選ばれることが多いです。
5.3 同期電動機の始動方法
同期電動機は、停止状態から自力で始動できないという大きな弱点があります。回転磁界は瞬時に同期速度で回り始めますが、慣性を持つ回転子は追従できないためです。そこで、何らかの補助手段で同期速度付近まで加速してから、界磁電流を投入して「同期引き入れ」を行います。
| 始動方法 | 原理 | 特徴 | 適用 |
|---|---|---|---|
| 自己始動法(ダンパ始動) | ダンパ巻線で誘導電動機として始動 | 最も一般的、大きな始動電流 | 汎用、中小型〜大型機 |
| 始動電動機法 | 別の小型電動機で加速 | 始動電流小、設備コスト増 | 特に大型機 |
| 減電圧始動法 | リアクトルや始動補償器で電圧を下げて始動 | 始動電流を抑制、始動トルクも低下 | 電源容量に制限がある場合 |
| インバータ始動法 | 低周波から徐々に周波数を上げる | 始動電流最小、滑らかな始動 | 可変速運転システム |
| 全電圧直入始動 | 定格電圧を直接印加 | 最も単純、始動電流が最大 | 電源容量に余裕がある場合 |
自己始動法(ダンパ始動)の詳細手順
最も一般的な始動方法であるダンパ始動の手順を詳しく見てみましょう:
- 界磁回路の準備:界磁巻線を放電抵抗を通じて短絡する。開放すると高電圧が誘起されて危険
- 電源投入:固定子に三相交流を印加。回転磁界が発生
- 誘導トルク発生:ダンパ巻線に電流が誘導され、誘導電動機として加速開始
- 加速:回転子が同期速度の95〜98%まで加速(すべり2〜5%)
- 同期引き入れ:適切なタイミングで界磁電流を投入
- 同期運転移行:回転子が同期速度に引き込まれ、安定運転に移行
始動時の界磁巻線の取り扱い
始動時に界磁巻線をどう処理するかは重要な問題です:
- 開放:回転磁界によって高電圧(定格の数倍〜数十倍)が誘起され、絶縁破壊の危険。避けるべき
- 短絡:誘起電圧は低いが、大きな循環電流が流れ、巻線が過熱する可能性
- 抵抗を通じて短絡(推奨):適切な抵抗値で電圧と電流のバランスを取る。界磁抵抗の5〜10倍程度の放電抵抗が使用される
同期引き入れのタイミング
同期引き入れを成功させるには、適切なタイミングで界磁電流を投入する必要があります。
- 回転速度がすべり5%以下(同期速度の95%以上)になったとき
- 界磁巻線の誘起電圧がゼロを通過するタイミング(磁極が適切な位置にある)
- 現代の電動機では、自動同期引入装置がこれを自動的に行う
タイミングが悪いと、引き入れに失敗したり、大きな衝撃トルクが発生して機械を損傷したりする可能性があります。
始動電流と始動トルク
自己始動時の特性は、ダンパ巻線の設計によって決まります:
- 始動電流:定格電流の4〜7倍程度(誘導電動機と同程度)
- 始動トルク:定格トルクの0.4〜1.5倍程度(ダンパ巻線の設計による)
- 引入トルク:同期引き入れ時に必要なトルク。負荷トルクの30%以上の余裕が必要
始動時間は負荷の慣性モーメントと始動トルクによって決まり、大型機では数十秒〜数分かかることもあります。
インバータ始動の利点
可変周波数インバータを使用する始動法には、多くの利点があります:
- 始動電流が定格電流程度に抑えられる
- 滑らかな加速が可能で、機械的衝撃がない
- 任意の速度で停止・運転が可能(可変速運転)
- 同期引き入れの問題が発生しない(常に同期状態を維持)
欠点はインバータのコストですが、省エネ効果や機械寿命の延長を考慮すると、トータルコストで有利になることも多いです。
5.4 同期機の制御システム
現代の同期機は、高度な制御システムによって運転されています。ここでは、発電機と電動機それぞれの制御方式について解説します。
同期発電機の制御体系
発電所における同期発電機の制御は、階層的に構成されています:
- 機器レベル:AVR(電圧制御)、ガバナ(速度制御)
- 発電所レベル:自動発電制御(AGC)、経済負荷配分
- 系統レベル:中央給電指令所からの出力指令、周波数制御
これらが連携して、系統全体の需給バランスと安定性を維持しています。
AGC(自動発電制御)の役割
AGC(Automatic Generation Control)は、系統周波数と連系線潮流を監視し、発電機の出力を自動調整するシステムです。
- 周波数制御:系統周波数の偏差に応じて、管轄エリア内の発電機出力を調整
- 連系線制御:他エリアとの電力融通を計画値に維持
- 経済負荷配分:燃料費が最小となるように各発電機の出力を配分
日本では、各電力会社の中央給電指令所がAGCを運用しています。
同期電動機の制御方式
同期電動機の制御は、用途によって異なります:
- 定速度運転(商用電源直結):始動後は一定速度で運転。励磁電流で力率を調整
- 可変速運転(インバータ駆動):V/f制御またはベクトル制御で速度・トルクを制御
- 位置制御(サーボモータ):エンコーダのフィードバックで高精度な位置決め
ベクトル制御(FOC)の概念
インバータ駆動の同期電動機では、ベクトル制御(磁界方向制御:Field-Oriented Control)が広く使われています。この制御法は:
- 電機子電流をトルク成分(q軸電流)と磁束成分(d軸電流)に分解
- トルク成分を制御することで、直流電動機のような高応答なトルク制御を実現
- 磁束成分を制御することで、効率最適化や弱め界磁運転が可能
PMSMのベクトル制御は電気自動車の駆動制御にも使われており、現代の電動機制御の基盤技術となっています。
保護システム
同期機には、様々な異常から機器を保護するためのリレーが設置されています。主な保護要素:
- 過電流保護(OCR):過負荷や短絡から保護
- 差動保護(DFR):巻線の内部故障を高速検出
- 地絡保護(GR):固定子巻線の地絡を検出
- 逆電力保護(RPR):発電機がモーター動作になるのを検出
- 過励磁保護:V/Hz過大による鉄心の過熱を防止
- 低励磁保護:脱調の危険を検出
- 軸受温度保護:機械的異常を検出
5.5 効率と損失
同期機の効率は、入力と出力の比で定義されます。効率を理解するには、どこでどのような損失が発生するかを知る必要があります。
効率の定義
発電機の場合:
\[\eta = \frac{P_{out}}{P_{in}} = \frac{P_{out}}{P_{out} + P_{loss}} = \frac{\text{電気出力}}{\text{機械入力}}\]電動機の場合:
\[\eta = \frac{P_{out}}{P_{in}} = \frac{P_{in} - P_{loss}}{P_{in}} = \frac{\text{機械出力}}{\text{電気入力}}\]同期機の損失の分類
同期機で発生する損失は、以下のように分類されます:
- 銅損(巻線損):電機子巻線と界磁巻線の抵抗による損失。\(P_{Cu} = I^2R\)
- 鉄損:鉄心のヒステリシス損と渦電流損の和
- 機械損:軸受の摩擦損と風損(回転子が空気をかき回す損失)
- 漂遊負荷損:漏れ磁束や高調波による追加損失
- 励磁損:励磁装置(励磁機など)での損失
大型同期機の効率
大型の同期機は非常に高効率です。容量別の目安:
- 1MW級:効率 95〜96%
- 10MW級:効率 97〜98%
- 100MW級:効率 98〜99%
- 1000MW級:効率 99%以上
1000MWの発電機で効率が0.1%改善すると、1MWの損失削減になります。年間で数億円の燃料費節約に相当するため、大型機では効率のわずかな改善が非常に重要です。
効率の計算例
定格出力5000kW、定格電圧6600Vの三相同期電動機がある。全負荷時の各損失が以下のとき、効率を求めよ。
- 電機子銅損:80kW
- 界磁銅損:30kW
- 鉄損:50kW
- 機械損:25kW
- 漂遊負荷損:15kW
【解答】
\begin{align*} \text{全損失} &= 80 + 30 + 50 + 25 + 15 = 200 \, \text{kW} \\ \text{入力} &= \text{出力} + \text{損失} = 5000 + 200 = 5200 \, \text{kW} \\ \eta &= \frac{5000}{5200} \times 100 = 96.2\% \end{align*}損失の特性
各損失の負荷依存性を理解しておきましょう:
- 固定損(無負荷損):鉄損、機械損、励磁損。負荷に関係なくほぼ一定
- 可変損(負荷損):銅損、漂遊負荷損。電流(負荷)の2乗に比例
効率が最大になるのは、固定損と可変損が等しくなる負荷点です。通常、定格負荷の70〜80%付近で最高効率となるよう設計されています。
同期機の応用と制御——試験で押さえるべきポイント
- 火力・原子力は円筒形(高速)、水力・ディーゼルは突極形(低速)発電機
- 発電機の制御:有効電力は原動機(ガバナ)、無効電力・電圧は励磁(AVR)で制御
- ガバナのドループ特性により、並列運転時の負荷分担が自動調整される
- AVRは電圧制御だけでなく、PSS機能で系統安定化にも寄与
- 同期電動機は大容量・力率改善・定速度運転が必要な用途に採用
- 同期調相機は無効電力調整専用で、過励磁で進み・不足励磁で遅れ無効電力を供給/吸収
- 自己始動法(ダンパ始動)が最も一般的な始動方法
- 始動時の界磁巻線は抵抗を通じて短絡(開放すると高電圧で危険)
- 同期引き入れは、すべり5%以下で界磁電流を投入
- 効率は大型機ほど高く、1000MW級では99%以上に達する
- 効率最大点は固定損=可変損となる負荷点(通常、定格の70〜80%)
6. 演習問題
6.1 基本計算問題
問題1:同期速度と極数の計算
50Hzの電源で750 r/minの同期速度で回転する同期電動機の極数を求めよ。
解答:
同期速度と極数、周波数の関係式は次のように表されます:
\[n_s = \frac{120f}{p}\]ここで:
- \(n_s\):同期速度 = 750 r/min
- \(f\):電源周波数 = 50 Hz
- \(p\):極数(求める値)
この式を極数 \(p\) について解きます:
\begin{align*} p &= \frac{120f}{n_s} \\[10pt] &= \frac{120 \times 50}{750} \\[10pt] &= \frac{6000}{750} \\[10pt] &= 8 \end{align*}したがって、この同期電動機の極数は8極です。
確認のために、8極の同期電動機の同期速度を計算してみると:
\begin{align*} n_s &= \frac{120 \times 50}{8} \\ &= \frac{6000}{8} \\ &= 750 \, \mathrm{r/min} \end{align*}計算結果が一致することを確認できました。
問題2:同期発電機の誘導起電力の計算
4極の同期発電機があり、毎極毎相の巻数が30、巻線係数が0.85、毎極の磁束が0.05 Wbである。回転速度が1500 r/minのとき、誘導される相電圧の実効値を求めよ。
解答:
同期発電機の誘導起電力(相電圧)は次の式で求められます:
\[E = 4.44 f N \Phi K_w\]ここで:
- \(E\):誘導起電力(相電圧)[V]
- \(f\):周波数 [Hz]
- \(N\):毎相の巻数(全極)
- \(\Phi\):毎極の磁束 = 0.05 Wb
- \(K_w\):巻線係数 = 0.85
まず、回転速度から周波数を計算します:
\[f = \frac{np}{120} = \frac{1500 \times 4}{120} = \frac{6000}{120} = 50 \, \mathrm{Hz}\]次に、毎相の全巻数を計算します。毎極毎相の巻数が30なので、4極では:
\[N = 30 \times 4 = 120 \text{ 巻}\]これらの値を誘導起電力の式に代入します:
\begin{align*} E &= 4.44 \times 50 \times 120 \times 0.05 \times 0.85 \\[10pt] &= 4.44 \times 50 \times 120 \times 0.05 \times 0.85 \\[10pt] &= 4.44 \times 50 \times 120 \times 0.0425 \\[10pt] &= 4.44 \times 50 \times 5.1 \\[10pt] &= 4.44 \times 255 \\[10pt] &= 1132.2 \, \mathrm{V} \end{align*}したがって、誘導される相電圧の実効値は約1132 Vです。
問題3:同期電動機の出力と力率の計算
三相同期電動機が220V、60Hz、100Aで運転されており、効率は92%である。この電動機が0.85進みの力率で運転しているとき、機械的出力と無効電力を求めよ。
解答:
(1) 機械的出力の計算:
まず、三相電動機の入力電力を計算します:
\[P_i = \sqrt{3} \times V \times I \times \cos\phi\]ここで:
- \(P_i\):入力電力 [W]
- \(V\):線間電圧 = 220 V
- \(I\):線電流 = 100 A
- \(\cos\phi\):力率 = 0.85(進み)
これらの値を式に代入すると:
\begin{align*} P_i &= \sqrt{3} \times 220 \times 100 \times 0.85 \\[10pt] &= 1.732 \times 220 \times 100 \times 0.85 \\[10pt] &= 1.732 \times 22000 \times 0.85 \\[10pt] &= 32397.8 \, \mathrm{W} \\[10pt] &= 32.4 \, \mathrm{kW} \end{align*}機械的出力は、入力電力と効率の積で求められます:
\begin{align*} P_o &= P_i \times \eta \\[10pt] &= 32.4 \times 0.92 \\[10pt] &= 29.8 \, \mathrm{kW} \end{align*}(2) 無効電力の計算:
三相回路の皮相電力は:
\[S = \sqrt{3} \times V \times I\] \begin{align*} S &= \sqrt{3} \times 220 \times 100 \\[10pt] &= 1.732 \times 22000 \\[10pt] &= 38104 \, \mathrm{VA} \\[10pt] &= 38.1 \, \mathrm{kVA} \end{align*}無効電力は、皮相電力と力率から計算できます:
\[Q = S \times \sin\phi\]ここで、\(\sin\phi = \sin(\cos^{-1}0.85) = \sin(31.79°) = 0.527\)
力率が進みであるため、同期電動機は系統に無効電力を供給しています:
\begin{align*} Q &= 38.1 \times 0.527 \\[10pt] &= 20.08 \, \mathrm{kvar} \end{align*}したがって、電動機の機械的出力は約29.8 kW、供給している無効電力は約20.1 kvarです。
6.2 過去問題
問題4:同期発電機の電圧調整率(第三種電気主任技術者試験 類似問題)
定格出力3000kVA、定格電圧6600V、定格力率0.8(遅れ)の同期発電機がある。定格出力時の端子電圧を6600Vに保つように励磁した状態から、負荷を遮断したとき、端子電圧が7260Vになった。この発電機の電圧調整率を求めよ。
解答:
同期発電機の電圧調整率は次の式で定義されます:
\[\text{電圧調整率} = \frac{E_0 - V_t}{V_t} \times 100\%\]ここで:
- \(E_0\):無負荷時の端子電圧 = 7260 V
- \(V_t\):定格負荷時の端子電圧 = 6600 V
この値を式に代入すると:
\begin{align*} \text{電圧調整率} &= \frac{7260 - 6600}{6600} \times 100\% \\[10pt] &= \frac{660}{6600} \times 100\% \\[10pt] &= 0.1 \times 100\% \\[10pt] &= 10\% \end{align*}したがって、この同期発電機の電圧調整率は10%です。
この値は、定格出力(力率0.8遅れ)での運転から無負荷運転に移行したときの端子電圧の上昇率を表しています。電圧調整率が小さいほど、負荷変動に対する電圧変動が小さく、電圧特性が良いことを示します。この発電機の場合、10%は一般的な大型同期発電機としては標準的な値です。
演習問題のポイント
- 同期速度の計算:\(n_s = \frac{120f}{p}\)を正確に使用すること
- 同期発電機の誘導起電力:\(E = 4.44 f N \Phi K_w\)の物理的意味を理解すること
- 三相回路の電力計算:有効電力 \(P = \sqrt{3} VI\cos\phi\)、無効電力 \(Q = \sqrt{3} VI\sin\phi\) を正確に使用すること
- 電圧調整率の定義:\(\text{電圧調整率} = \frac{E_0 - V_t}{V_t} \times 100\%\) を理解すること
- 同期電動機の引込みメカニズムと必要条件を理解すること
- 単位の一貫性に注意すること(特にkWとW、rpmと角速度の変換など)
まとめ
本ページでは、第三種電気主任技術者試験の重要分野である「同期機(電動機・発電機)」について学習しました。同期機の基本構造から動作原理、特性、応用と制御まで、幅広く解説しています。同期機は電力系統の発電機として、また特殊な産業用電動機として重要な役割を果たしており、その特性を理解することは電気技術者にとって必須の知識です。
本ページの内容をしっかりと理解し、演習問題を繰り返し解くことで、試験での得点力向上につながります。また、実務においても同期機の選定や運用、トラブルシューティングに役立つ知識となるでしょう。
学習のポイント
同期機の学習で特に重要な点は以下の通りです:
- 同期機の基本構造と円筒形・突極形の違いを理解する
- 同期速度と極数、周波数の関係を把握する
- 同期発電機の無負荷特性、外部特性、電圧調整率の意味を理解する
- 同期電動機のV曲線と力率制御メカニズムを理解する
- 発電機として運転する場合と電動機として運転する場合の特性の違いを比較できる
- 並行運転の条件と同期投入の手順を理解する
- 同期安定度の概念と安定運転の条件を理解する
次回の学習では、「変圧器」について解説します。変圧器は電力系統において電圧変換を行う重要な静止器であり、その原理と特性を理解することで、電気機器に関する知識がさらに広がります。